Author: Zhang Zibo
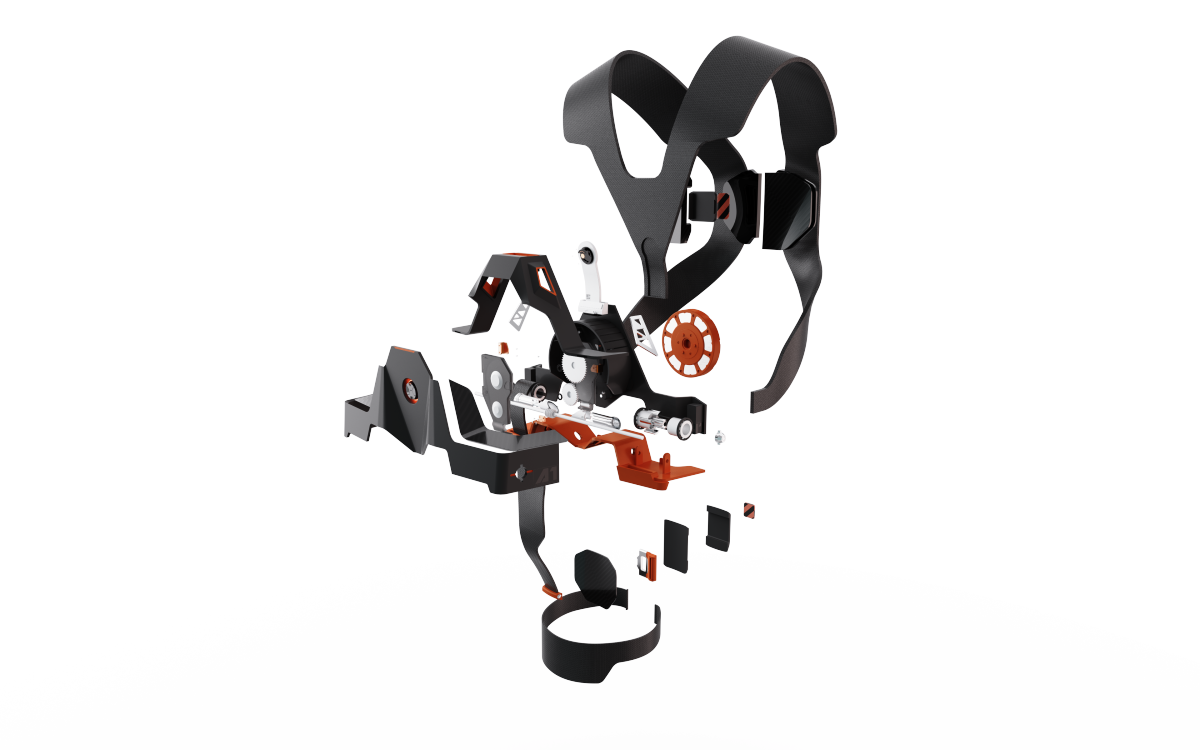
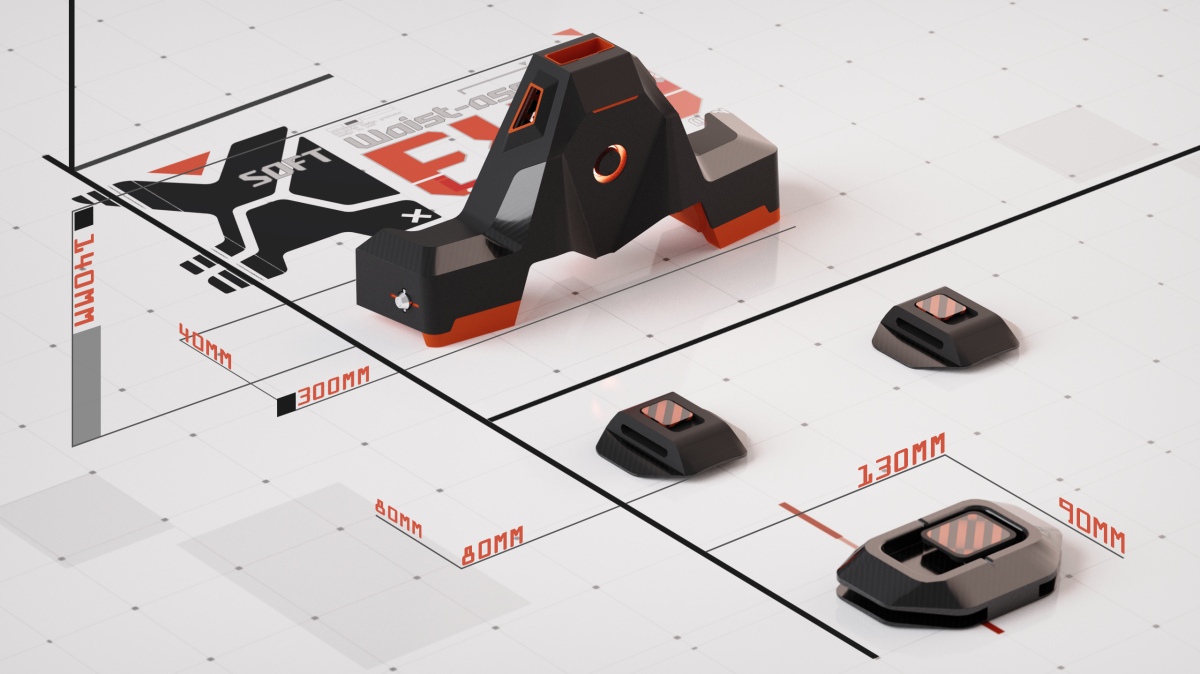
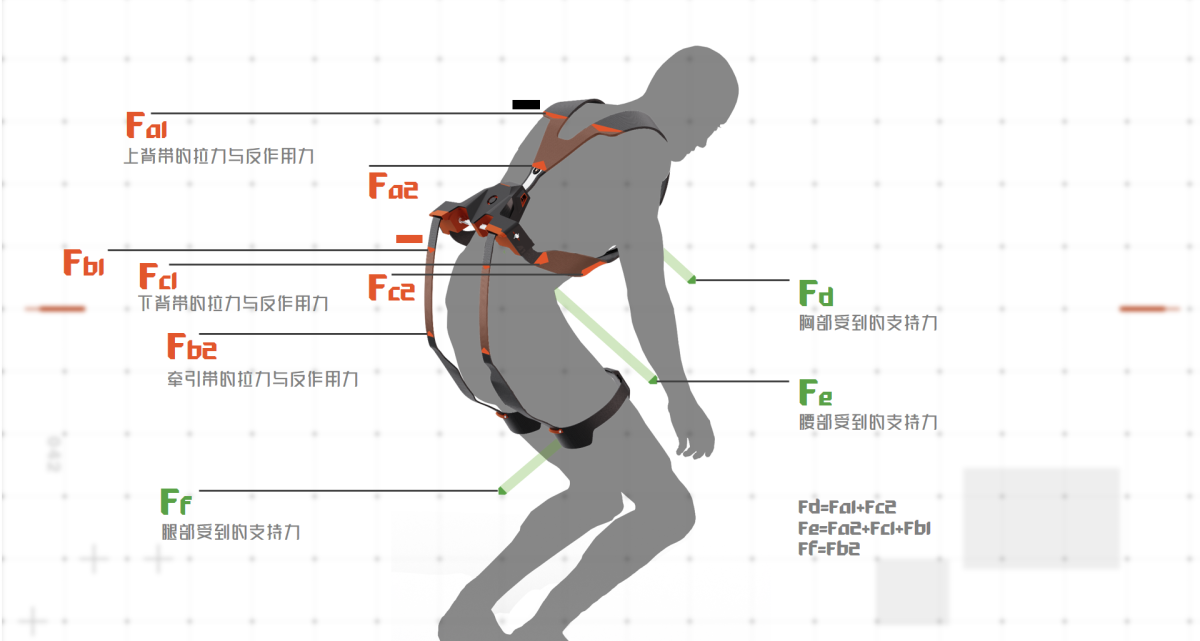
Introduction: In airport loading and unloading, logistics and transportation industries, lumbar injury, such as lumbar muscle strain, lumbar disc herniation has always been the inevitable pain of these heavy manual workers. When bending over to lift a heavy object, the torque of the L4/L5 lumbar spine of the waist will far exceed the gravity of the heavy object. At the same time, in order to avoid occupational injuries of loading and unloading workers and improve work efficiency, the multi-mode fusion motion intention recognition technology based on fretting, The adaptive iterative learning control technology of repetitive complex motions, mechanical analysis based on the power assist method and the structure of the human waist, to study gravity and, this paper studies the comfort design of CMF to realize human wear, and designs and develops a waist-assisted exoskeleton robot. This exoskeleton is intended to reduce the muscle strength of the lumbar extensor muscle (thoracic erector spinae, lumbar erector spinae) and the back thigh muscle (hamstring muscle), reduce the torque of the fourth lumbar spine and the fifth lumbar intervertebral disc (L4/L5), and assist the human body in lifting heavy objects. The product structure is that the upper body X-shaped strap is connected with the waist main machine, and the crimpers on both sides of the main machine contain traction straps, which are connected with the leg straps at the thighs on both sides.
The wearing method is to fix the strap and leg strap in the corresponding position, and there are carbon fiber plates with increased stress area at the chest and thigh. When the user bends and squats down, the traction belt on the back is pulled out of the curling device. After the recognition is made, the built-in motor works and retracts the traction belt to form a force perpendicular to the trunk backward at the chest and thigh. At the same time, it provides support to the lumbar extensors, assists the user to stand and stretch the limbs, and reduces the usage rate and strength of the lumbar muscles. Compared with the existing hip joint double-motor exoskeleton, the limitation of hard material is reduced, so that the thigh can achieve full freedom of movement.






Original link: https://pinwall.cn/project/37589
The copyright of this work belongs to 湖南大学设计艺术学院. No use is allowed without explicit permission from owner.

New user?Create an account
Log In Reset your password.
Account existed?Log In
Read and agree to the User Agreement Terms of Use.
Please enter your email to reset your password





Comment Board (0)
Empty comment