Author: Qin Weiheng
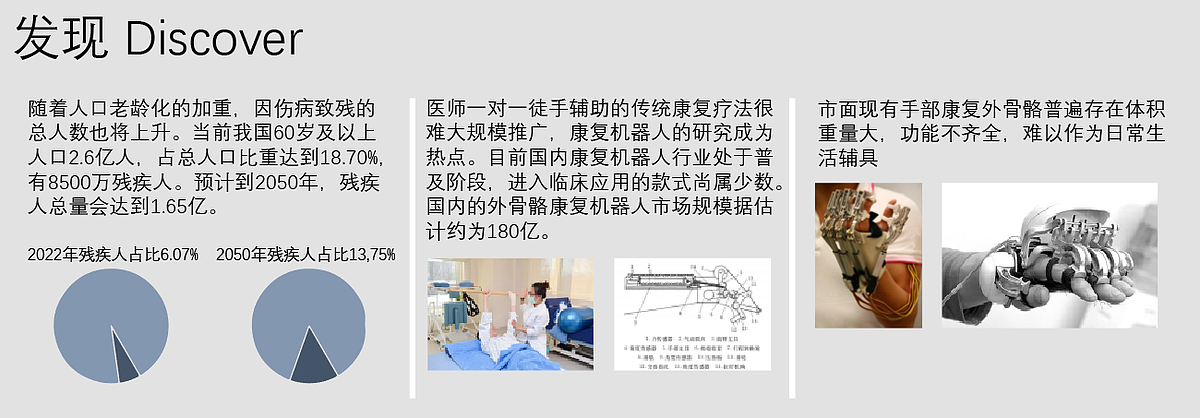
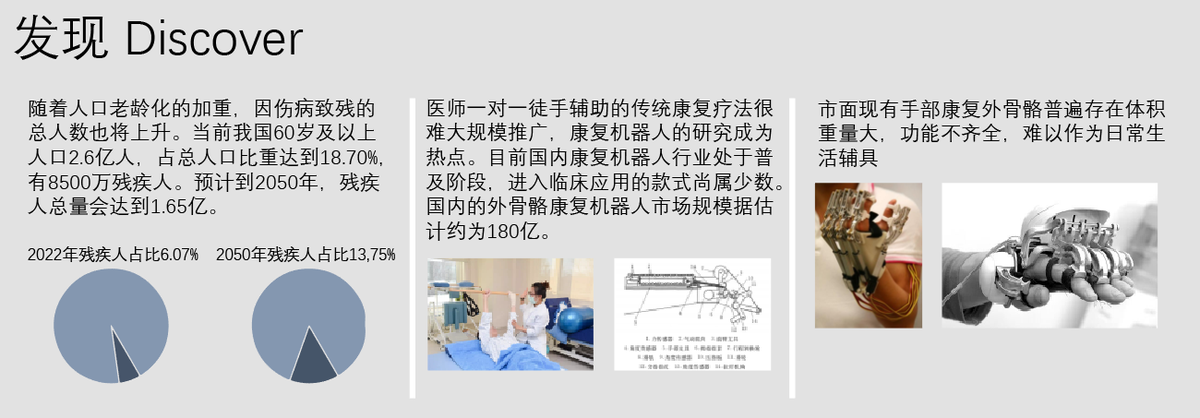
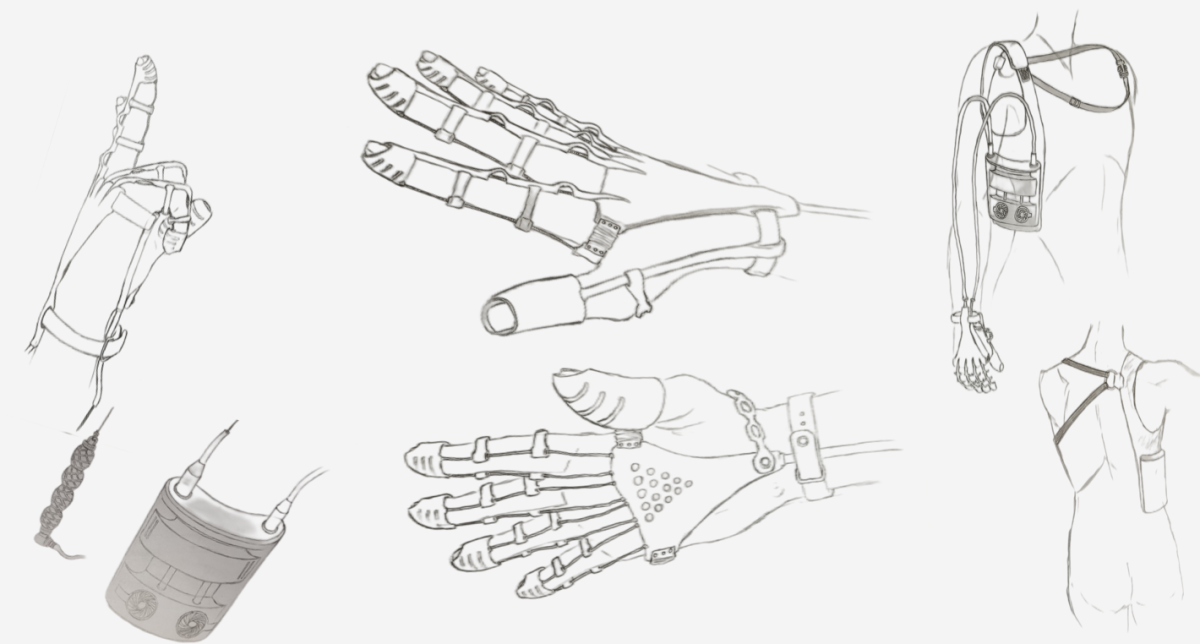
This topic is based on bionics and ergonomics, rehabilitation training for the disabled for hand functional injuries and daily life aids, etc., aiming at the specific needs of rehabilitation centers and other institutions and individual user markets, and is committed to providing better than the existing The therapeutic effect and user experience of the traditional end-traction rehabilitation robot have carried out the design practice of a wearable hand exoskeleton system with multi-joint collaborative rehabilitation.

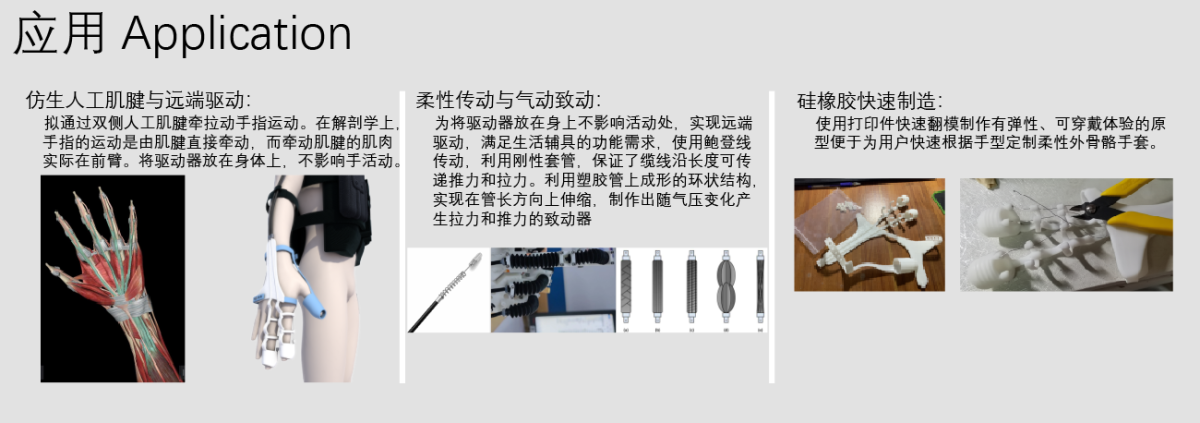
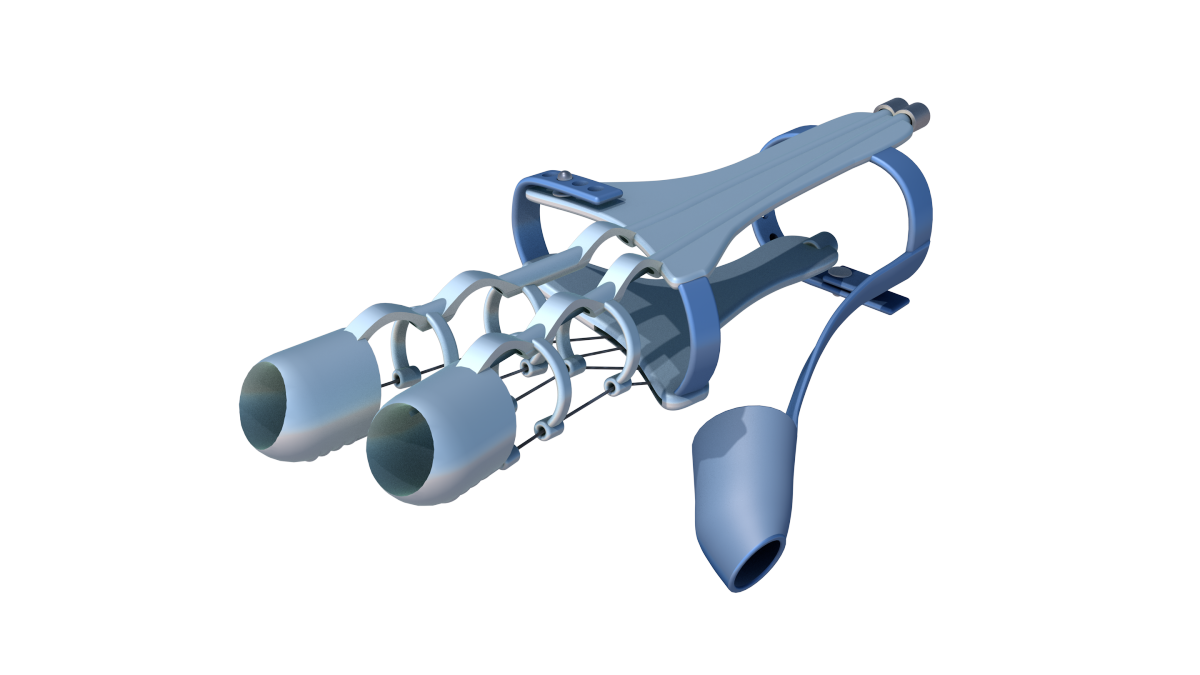
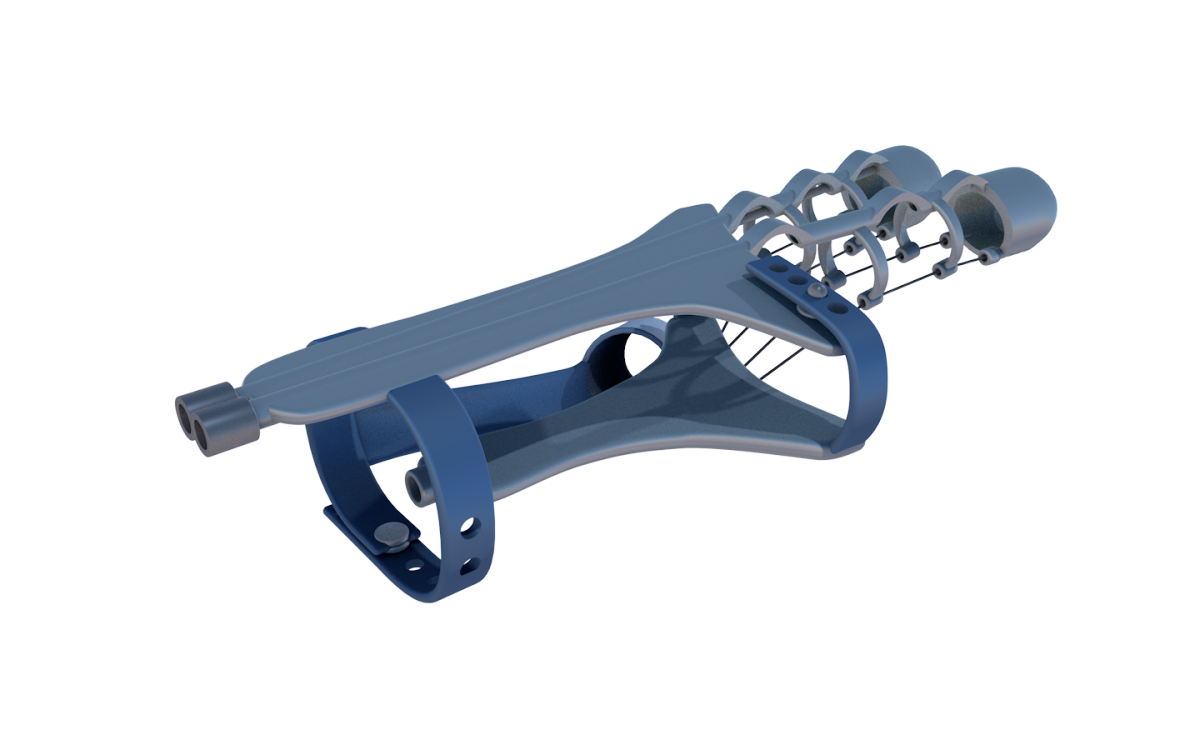
Existing wearable upper limb exoskeleton rehabilitation robots still have problems such as less freedom, bloated volume, large mass, and poor human-computer interaction. Future development may focus on increasing the number of degrees of freedom, further achieving lightweight, and promoting The pneumatic muscle actuator is used in the design of adaptive assist mode, propulsion elastic driver and variable stiffness driver. This is a tubular actuator, which is characterized by the reduction of actuation length after compression.
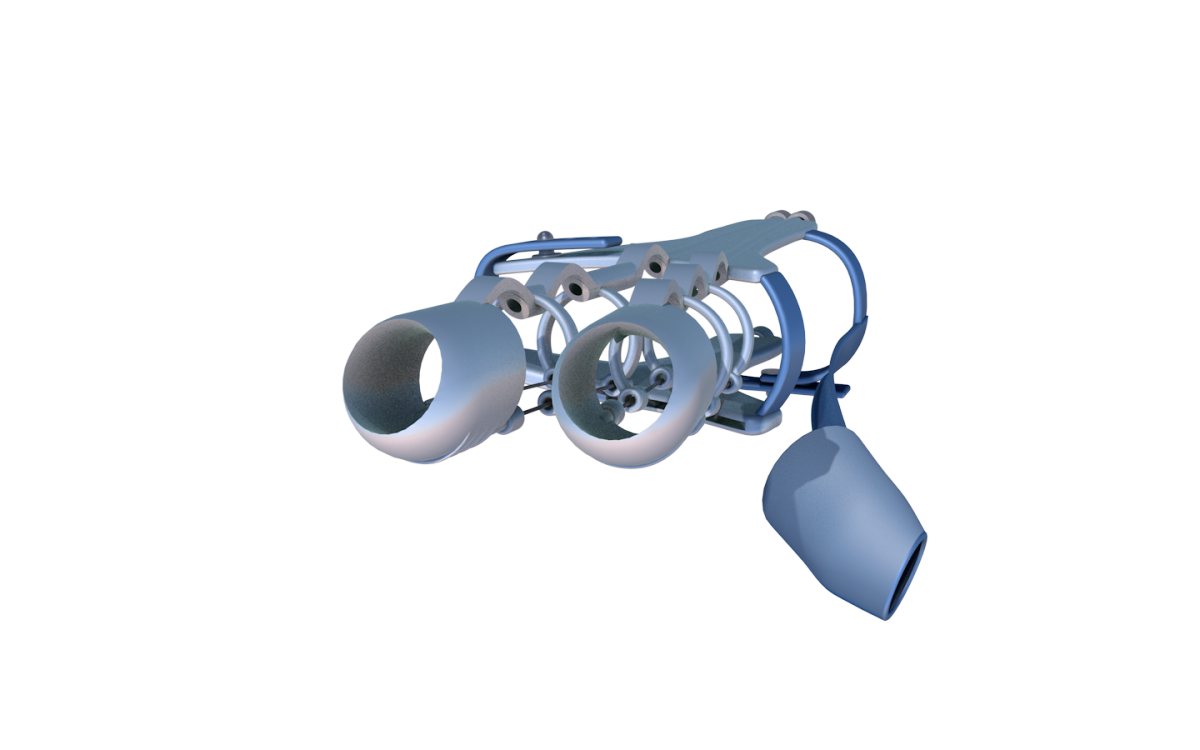
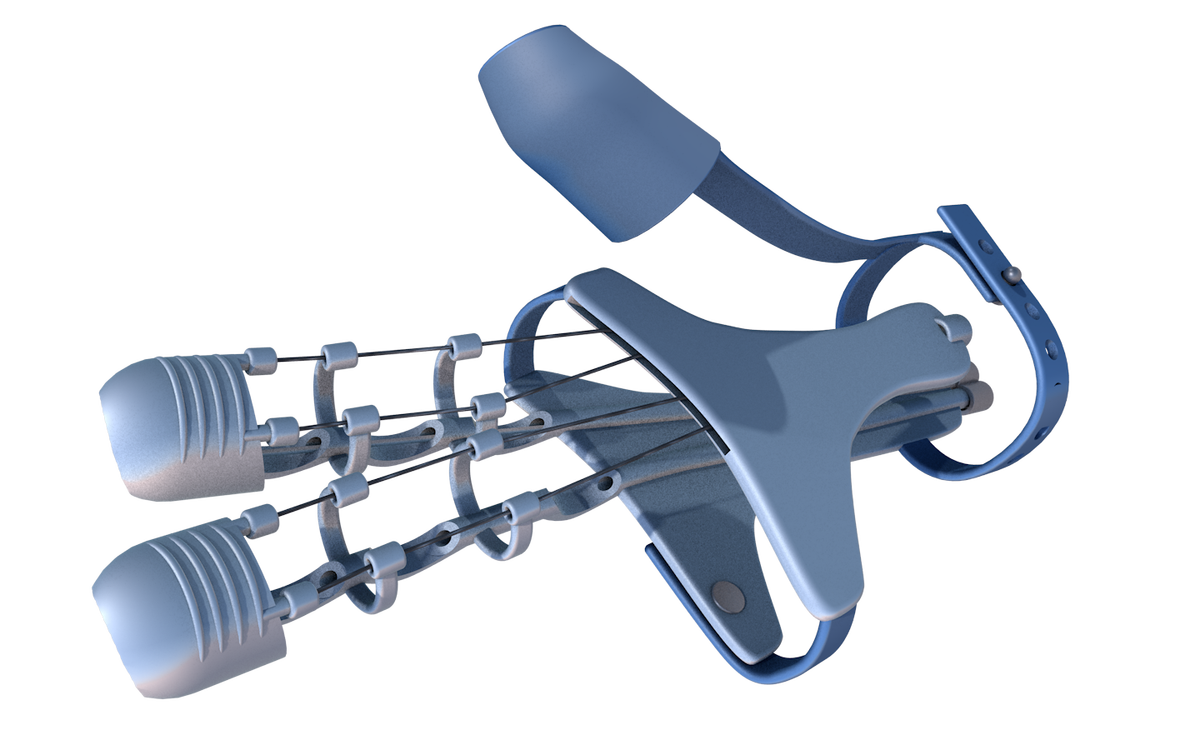
PAMs are very light actuators that are smooth, accurate and responsive, and can generate significant force when fully stretched. The flexible transmission technology is adopted, so the Bowden line structure, which can transmit thrust and tension, can be selected as much as possible to save the space of the hand to a large extent (and the driver is placed in other places that do not affect the activity), making the device easy to wear out and perform more delicate hand movements, and realize the function of life aids.
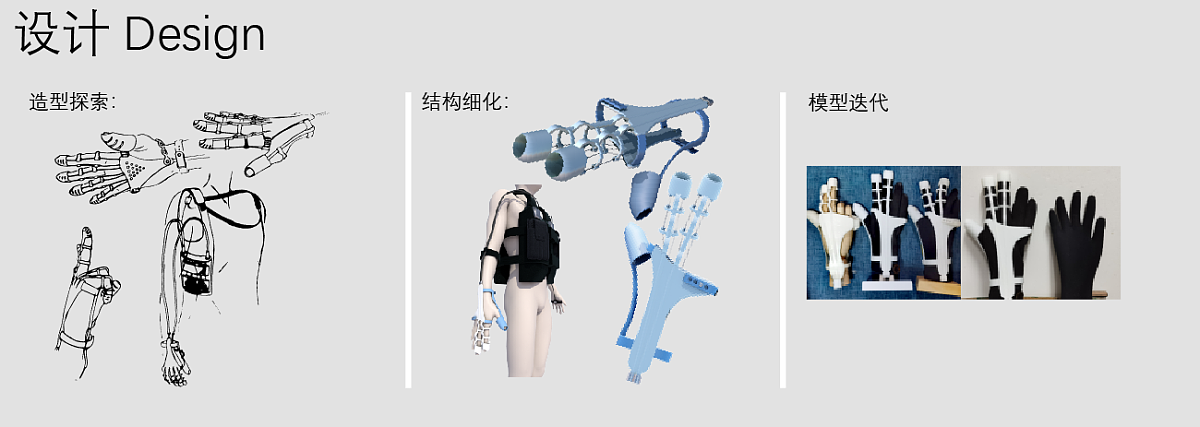
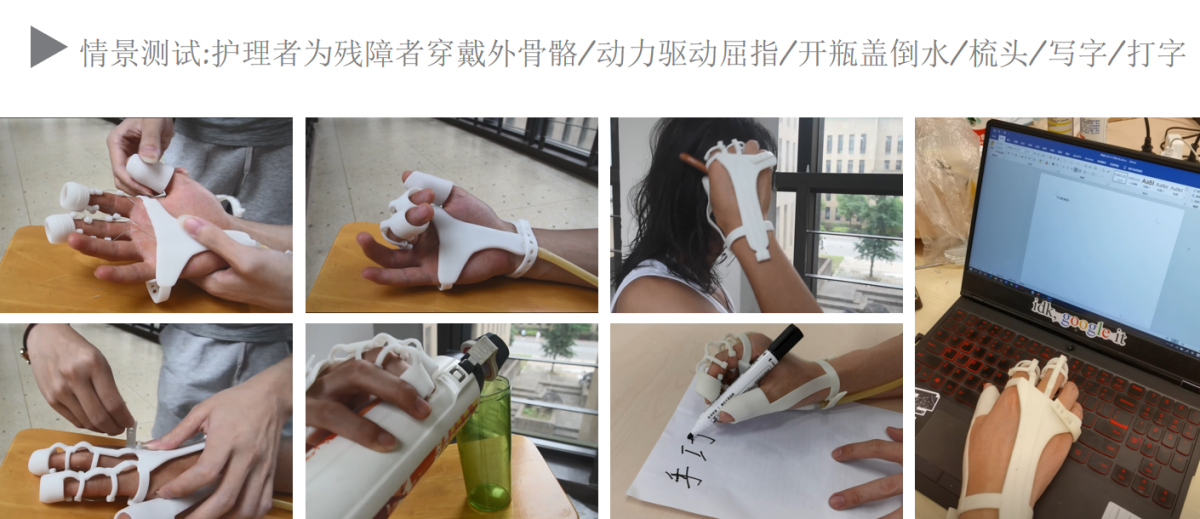
Using the principle of mirror image training, the movement of the contralateral limb is collected. After mirror image processing, it is reappeared on the affected limb through mechanical structure. The closed-loop relationship of limb-eye-brain-motor neuron is used to train and restore the damaged nervous system and speed up the recovery process. Emphasize the two points of medical equipment and life assistive devices, emphasize the reduction of the volume and weight of the hand device, pay attention to the softness of the appearance and the fit when wearing, and integrate into the daily life of patients.
Link to original work: https://pinwall.cn/project/42162











Comment Board (0)
Empty comment