Zhejiang Zhongli Machinery Co., Ltd.
Zhang Xiping, Huang Tao, Li Shuai Shuai
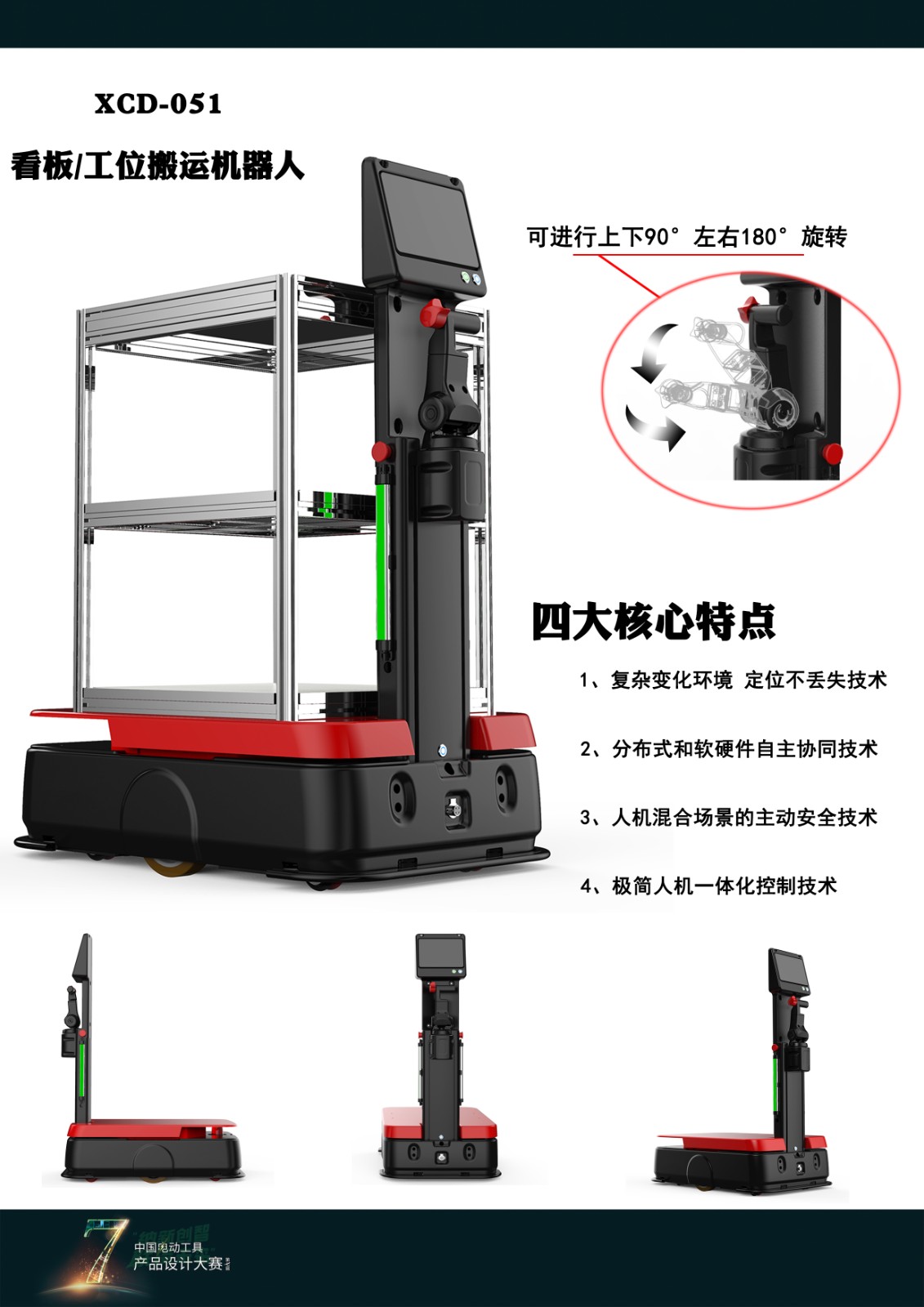
1. Based on the industry's first distance azimuth C- Navi positioning and navigation algorithm. The shell realizes high reliability, high-precision positioning in all scenes such as narrow roadways, and high-precision attitude estimation under vehicle stationary/motion; 2. Based on multi-sensor fusion technologies such as laser, vision, and IMU, it can be achieved in complex environments No loss; 3. One-button intelligent mapping and route design, without professional knowledge, can complete intelligent real-time mapping and B- spline curve calibration; 4. In any state, manual and automatic switching can be realized, manual and automatic operation can be performed seamlessly, and complex scene operation can be handled. 5. CAN bus architecture controller, vehicle standard, with high reliability; Provide Web services, and any intelligent terminal can access and control; 6. AI for humanoid recognition can stop if any part of the body enters the set area. 7. Obstacle avoidance by classification; 8. Multiple warnings.
The copyright of this work belongs to 中国电动工具设计大赛. No use is allowed without explicit permission from owner.

New user?Create an account
Log In Reset your password.
Account existed?Log In
Read and agree to the User Agreement Terms of Use.
Please enter your email to reset your password




Comment Board (0)
Empty comment