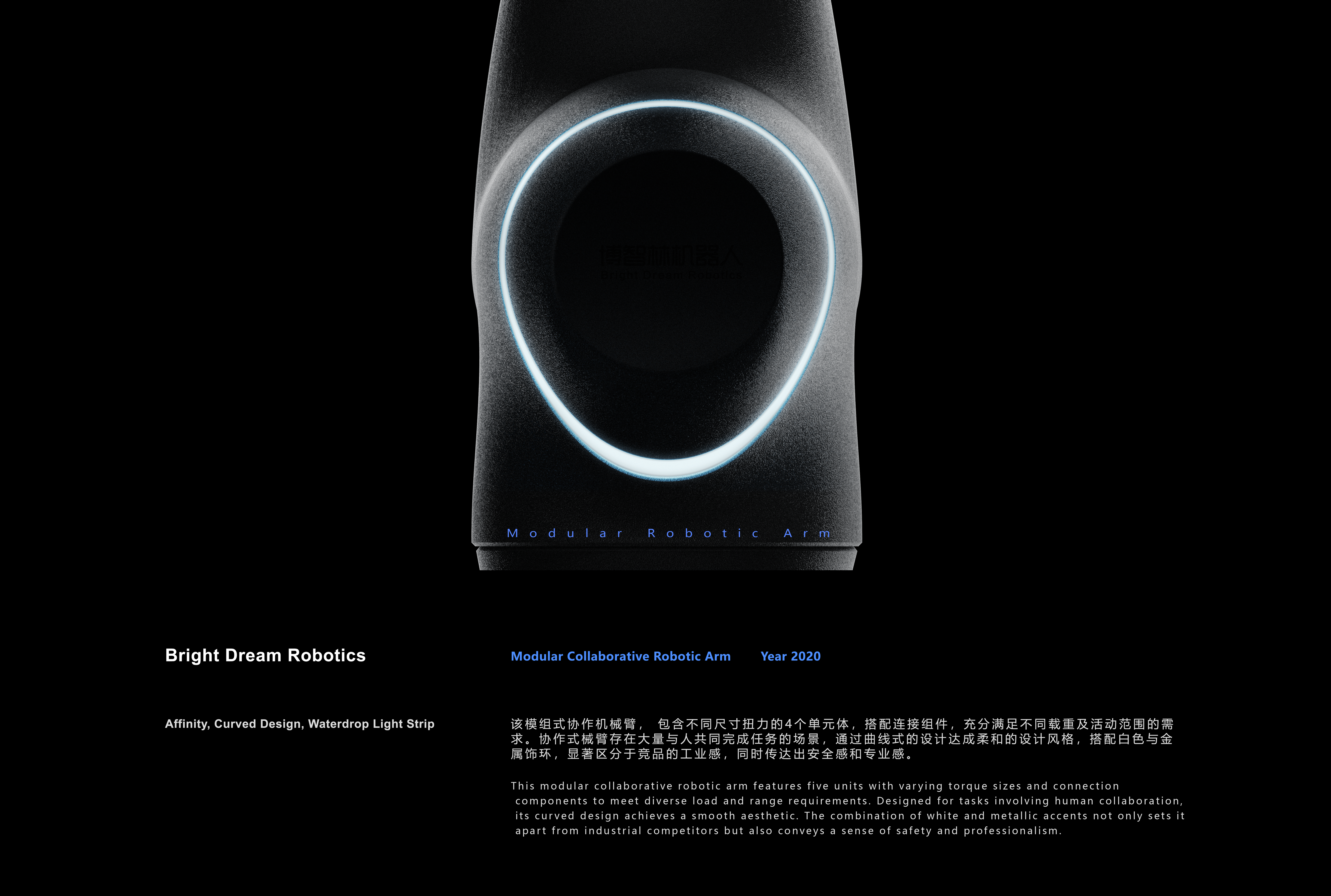
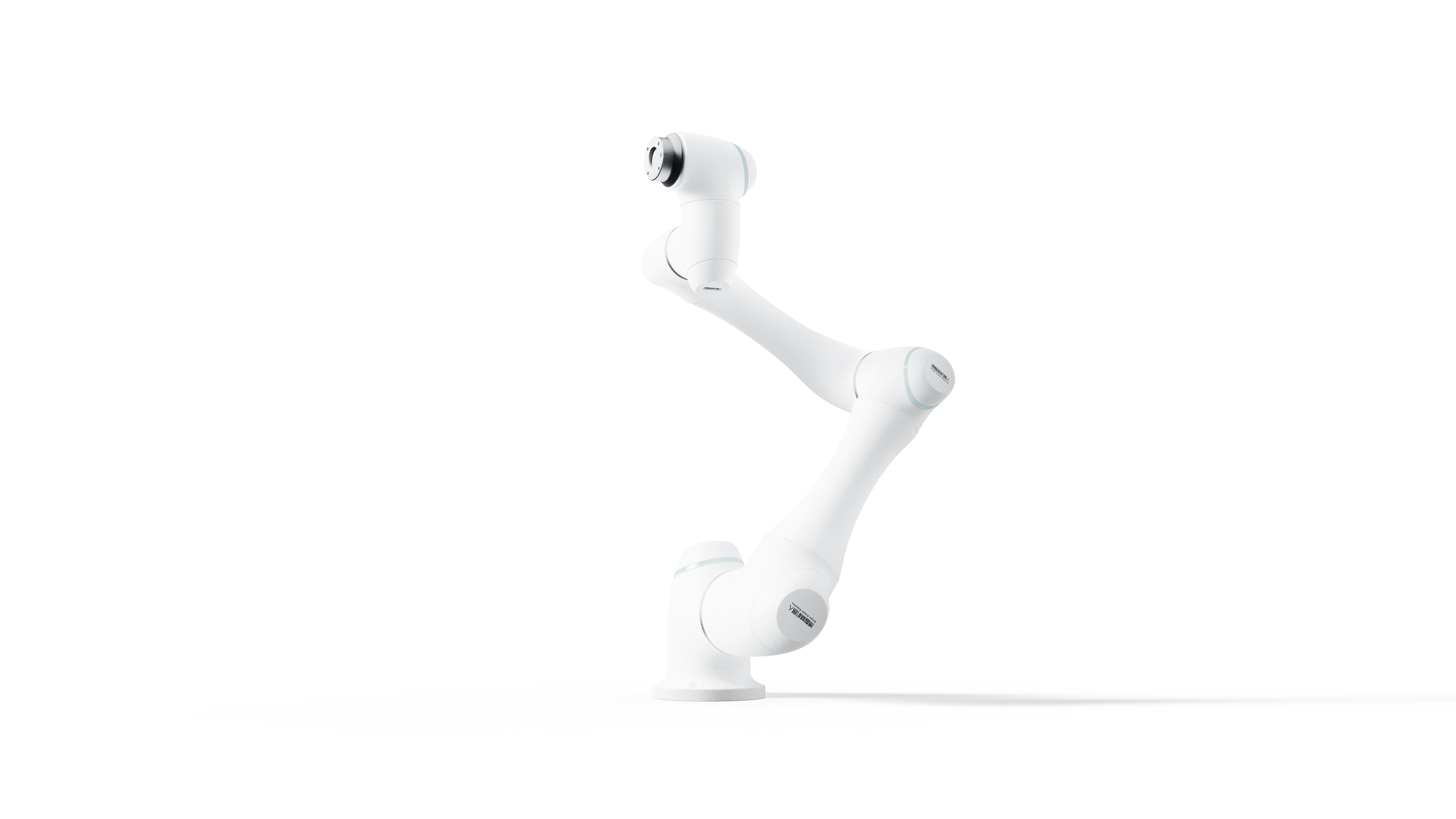
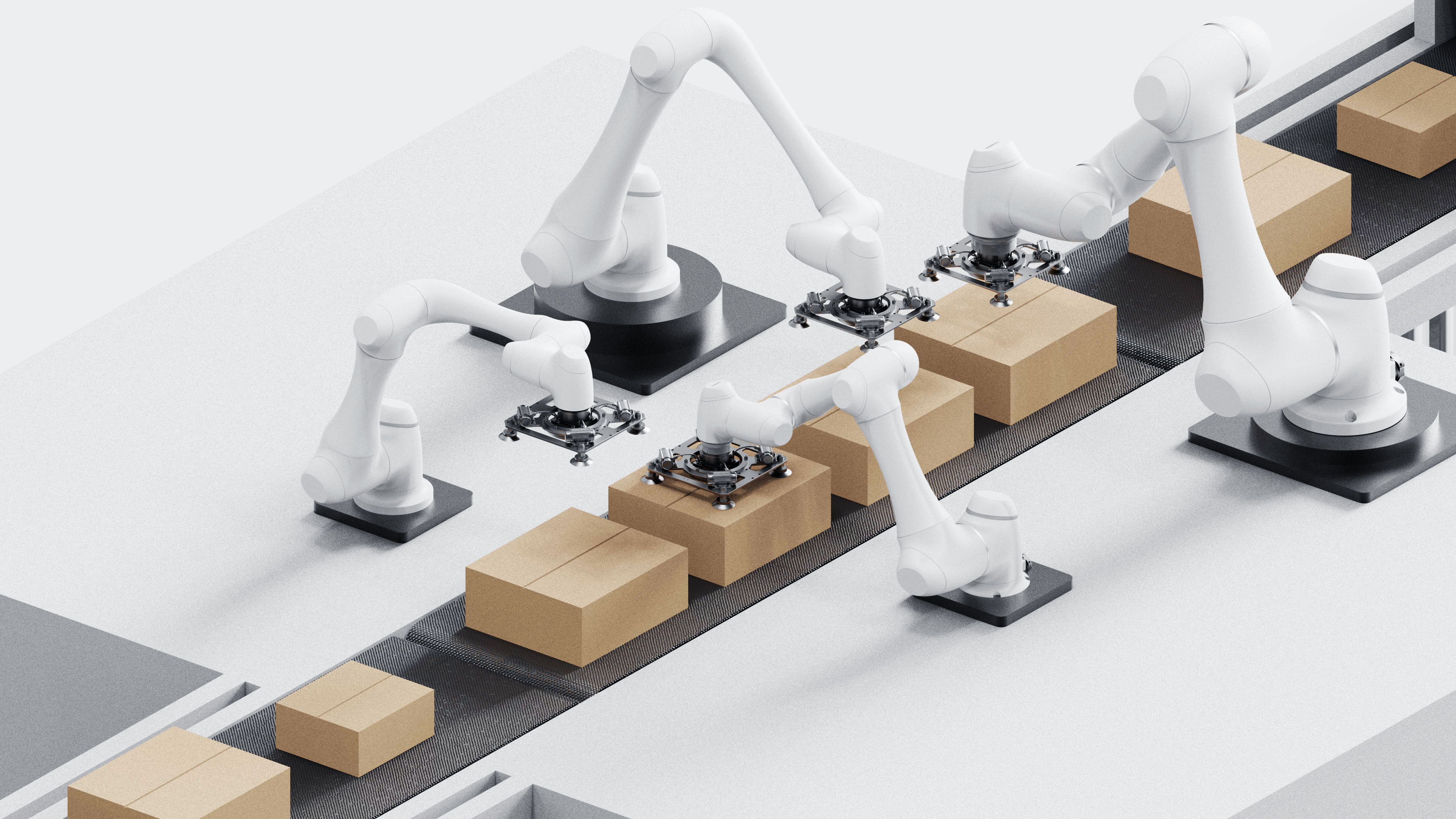
Design of a 6-axis collaborative robotic arm completed in 2020. Through the splicing of different individual elements, different loads and ranges of motion can be achieved. With white as the main color, with light blue drop-shaped lamp belt, with soft and coherent form, I hope to break through the traditional industrial arm geometric shape rigid and rigid indifference.
With white as the main color, with light blue light, with a soft and coherent form, breaking through the traditional mechanical arm geometric modeling rigid and rigid indifference.
Through the proportion and location of different color areas, to meet the customization needs of different scenes and customers.
In order for modules to be multiplexed end-to-end, the dimensions of the head and tail ends of a single module need to be the same. Reusable modules greatly reduce the cost of research and development, production and warehousing.










High-tech
6666
this is good