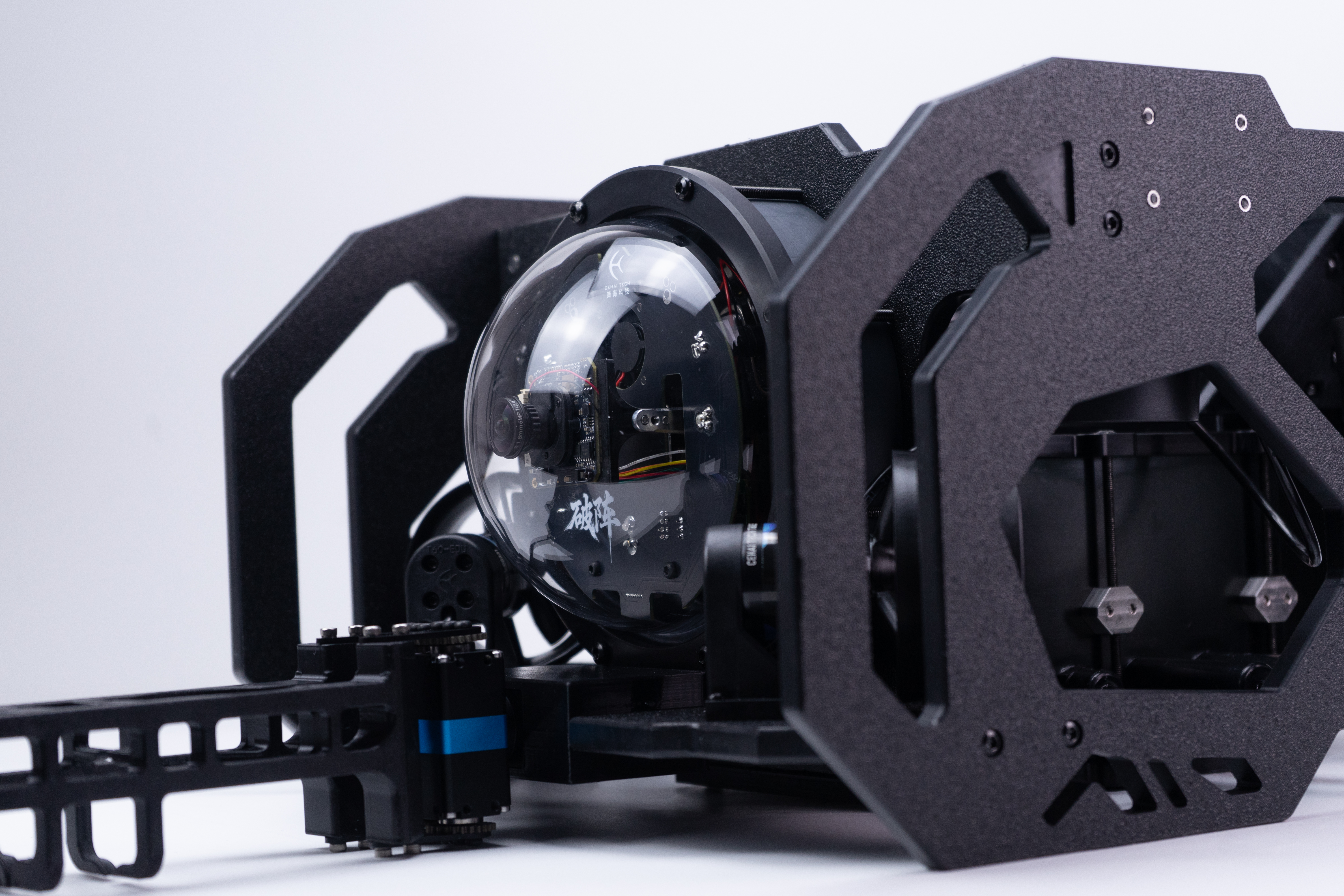
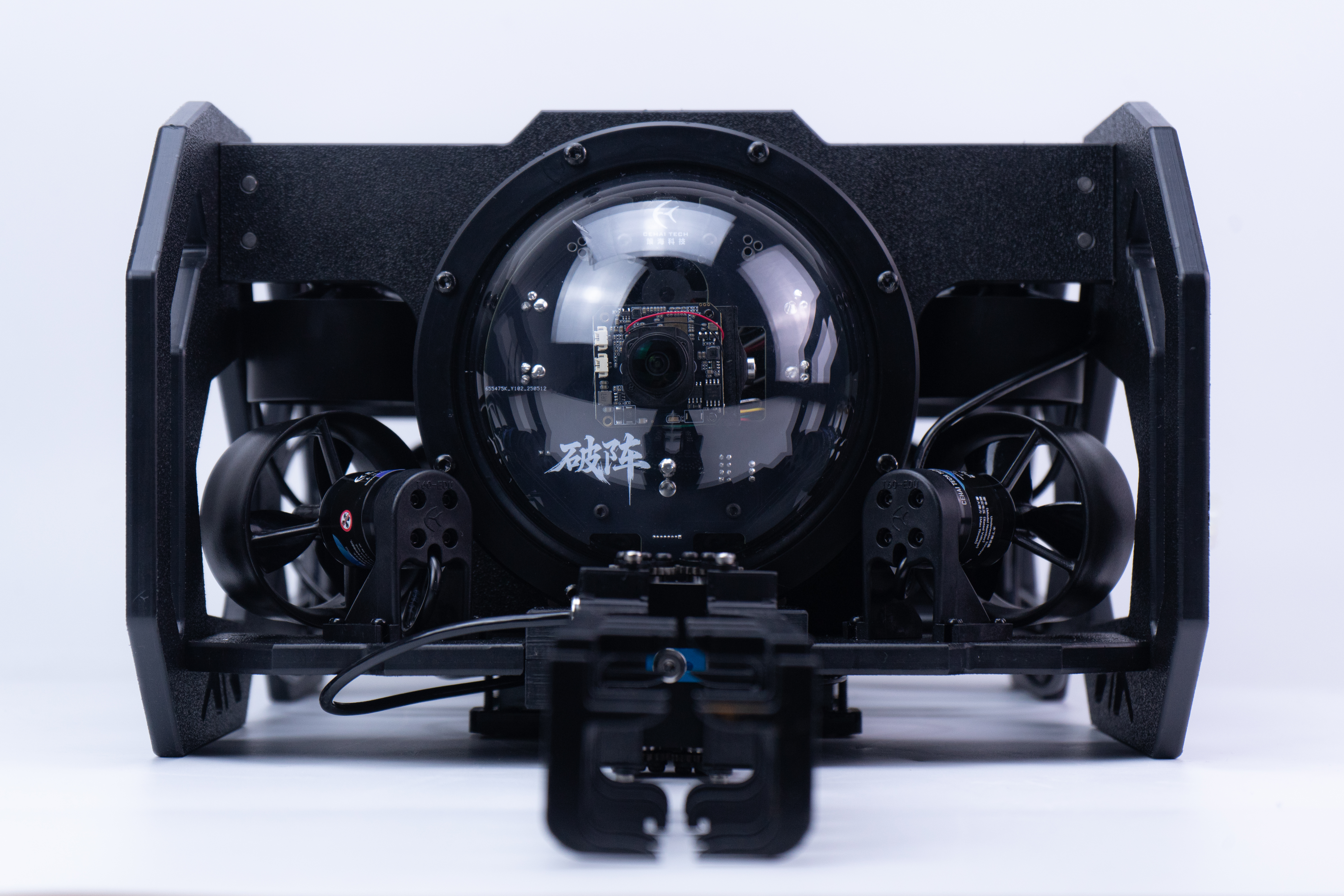
Broken array (Challenge) underwater robot can meet the underwater robot teaching, competition and scientific research purposes.
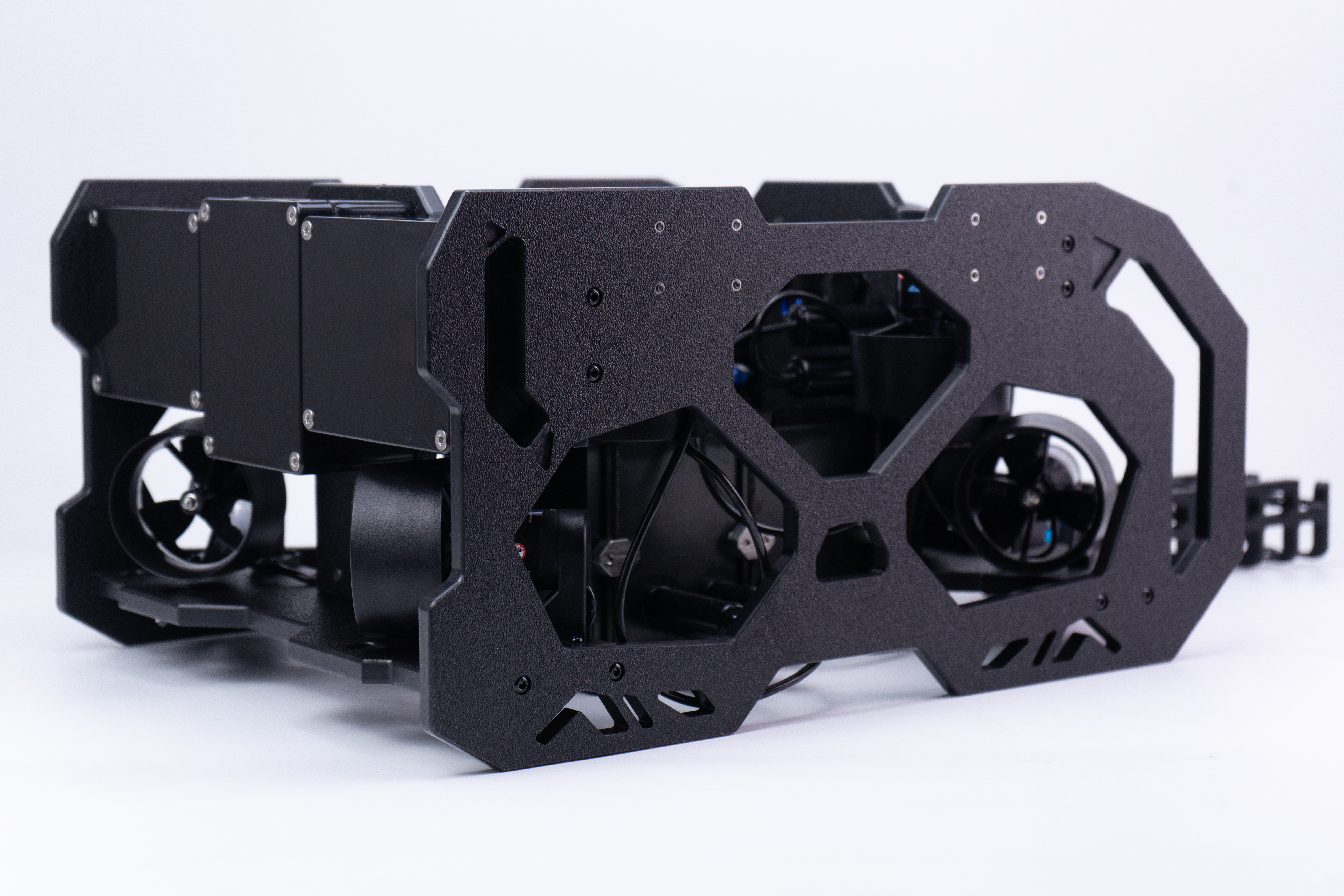
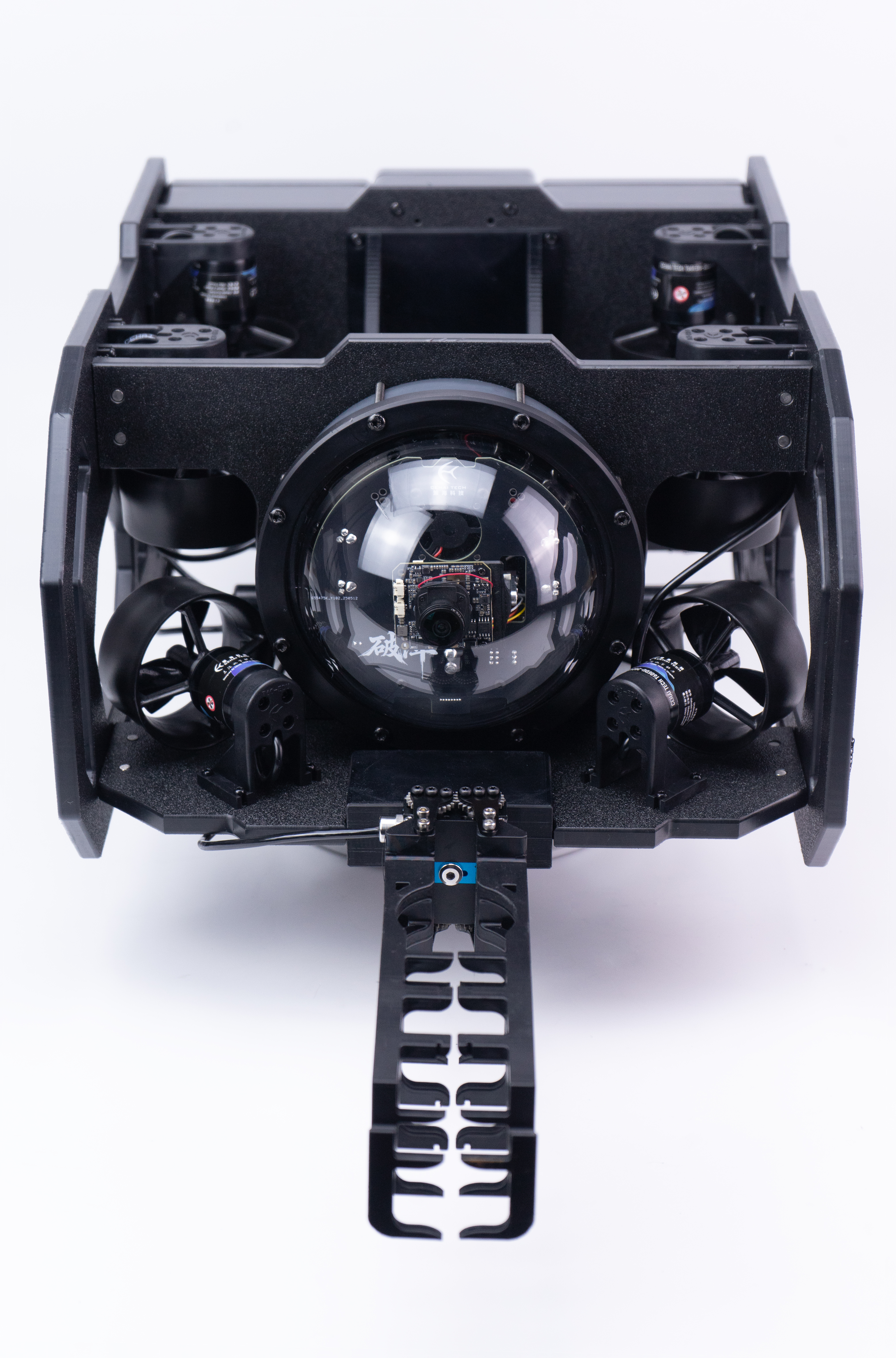
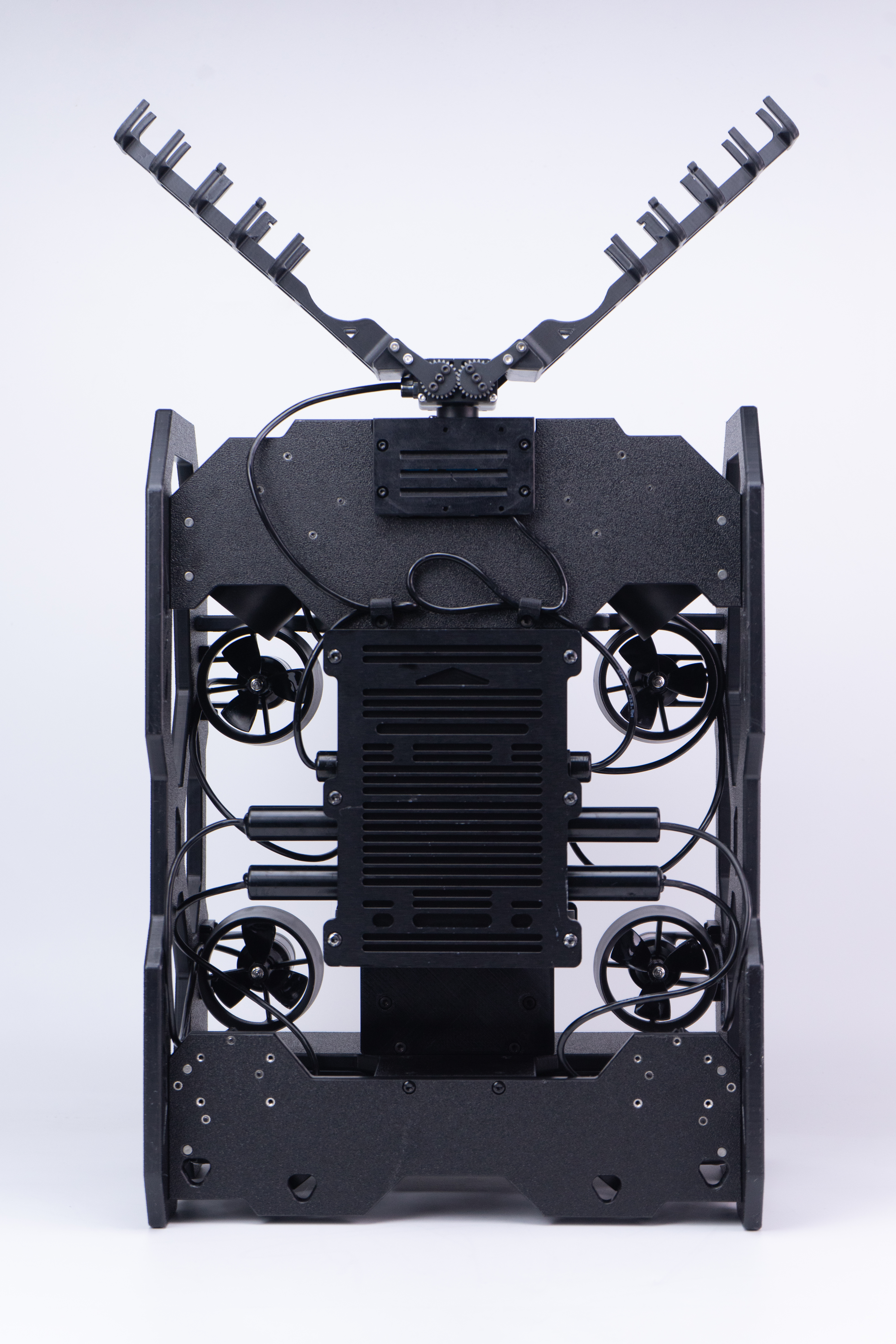
The design is compact and light in weight. It supports full-degree-of-freedom six-push and eight-push layouts, and dual-mode switching. The full-degree-of-freedom eight-push can be reduced to full-degree-of-freedom six-push in the "battle damage" state to continue fighting.
Abdominal cabin opening design, onshore power supply, no endurance problem, hidden metal cabin, water-cooled heat dissipation, no fear of device heating, smaller water resistance and larger carrying space, plug-in screw insertion scheme, easy to quickly replace propeller alone and mode switch metal cabin screw electric adjustment scheme, propeller is smaller, but its strength is not reduced!




The copyright of this work belongs to 期颐. No use is allowed without explicit permission from owner.

New user?Create an account
Log In Reset your password.
Account existed?Log In
Read and agree to the User Agreement Terms of Use.
Please enter your email to reset your password


Gear wire all exposed, sure practical?
It's kind of like something RMer could come up. Another question, the product as an underwater device, waterproof performance how to guarantee?
really good
6666
This is too advanced