
In 2020, the LeapX team participated in the design and development of the Connolasten endoscopic surgery robot. We conducted a large number of study and research and interviews with medical experts together with the Connorst team, excavated the use needs of the medical team, and experimented with various design frameworks to improve the efficiency of the medical staff's surgical work, creating a better surgical experience for patients and the medical team. After many years, it finally officially appeared. This is the most complex, longest design time and most expensive product in the current LeapX landing project.
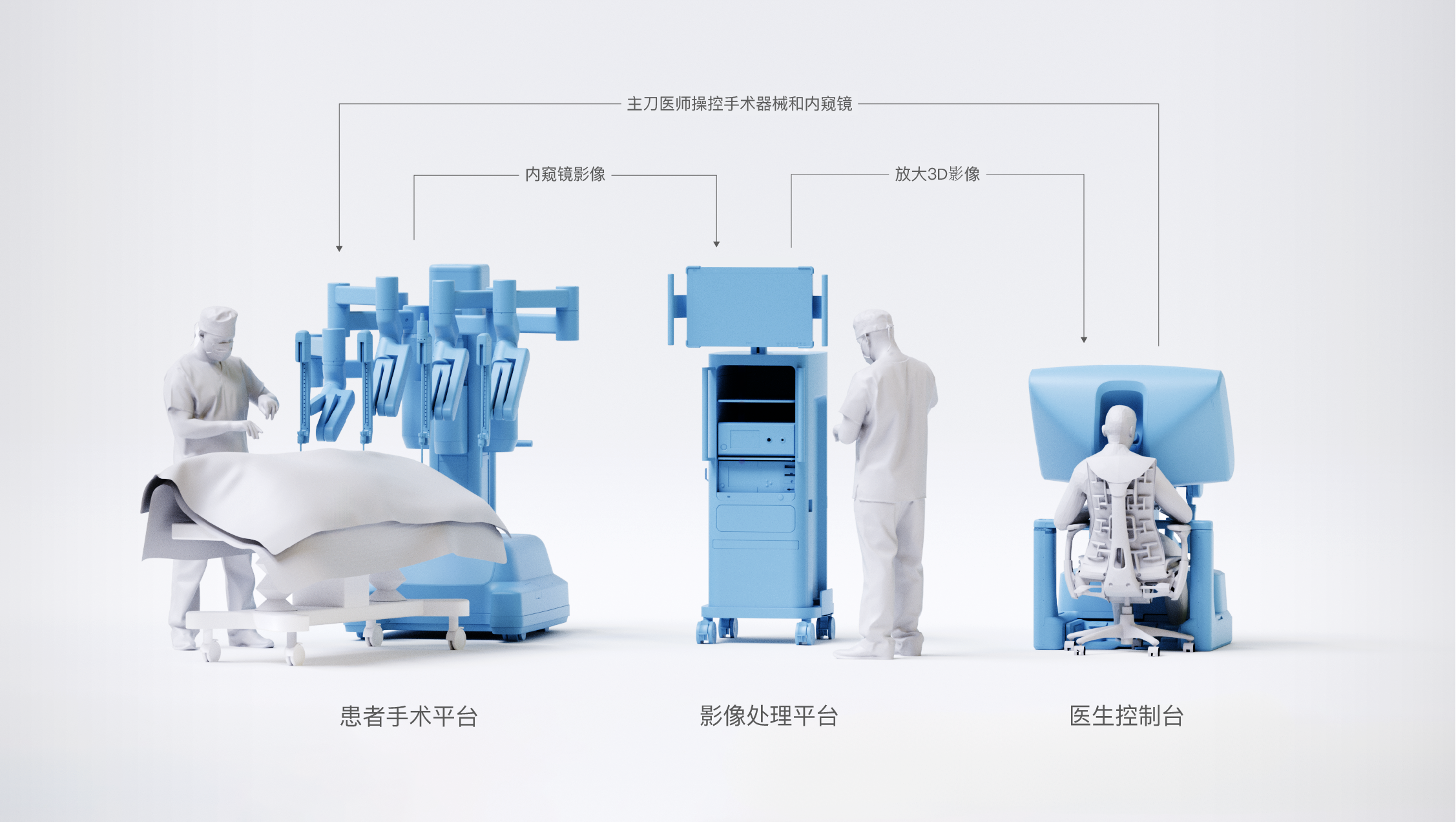
The surgical robot system consists of a patient surgery platform (Patient Side Robot), an image processing platform (Vision Cart), and a doctor console (Surgeon Console). They can reduce the proportion of the doctor's movements and help the endoscopist to transform the real-time surgical operation into more precise movements, so as to achieve more accurate surgery and effectively reduce the trauma and recovery time of the patient.



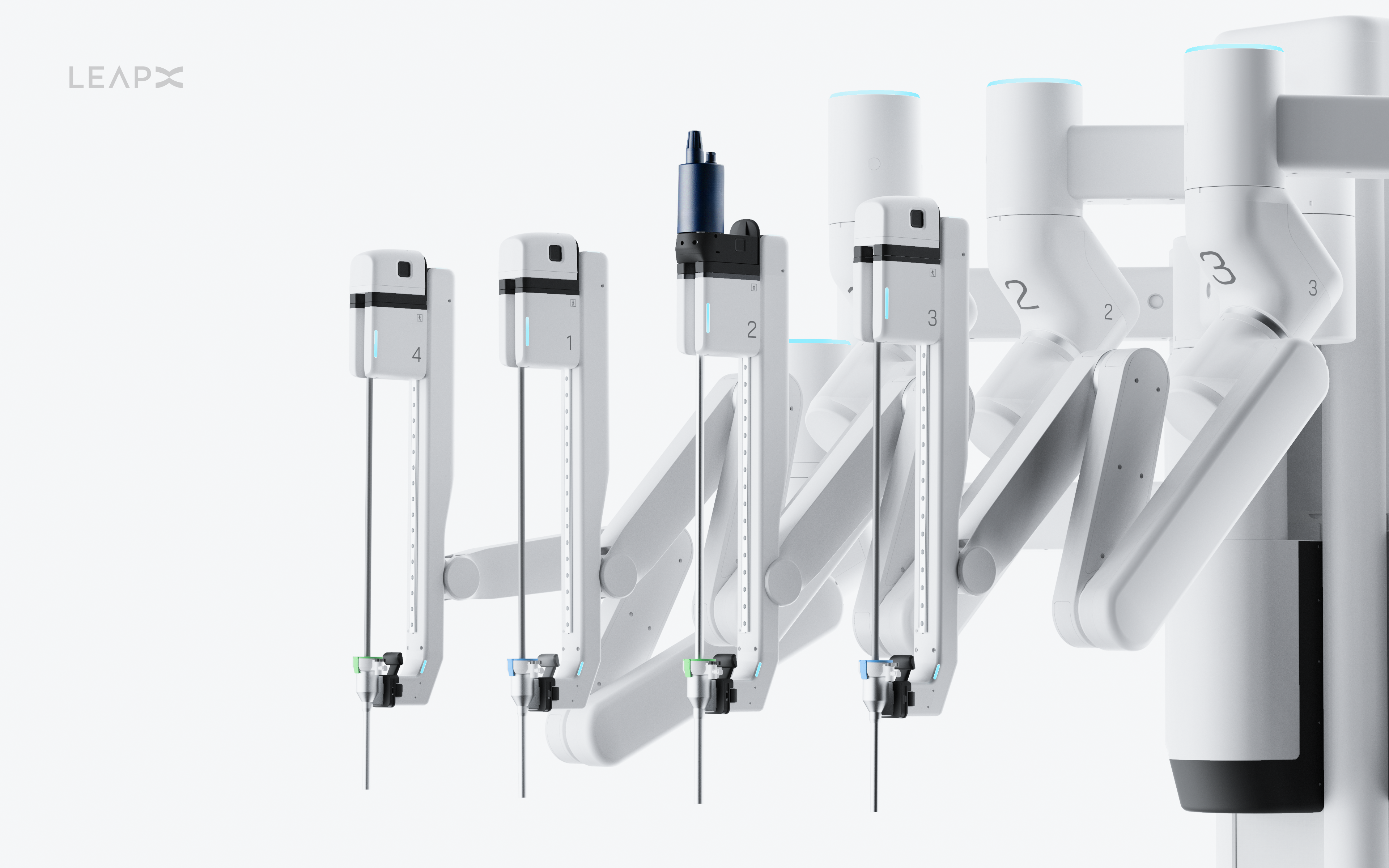
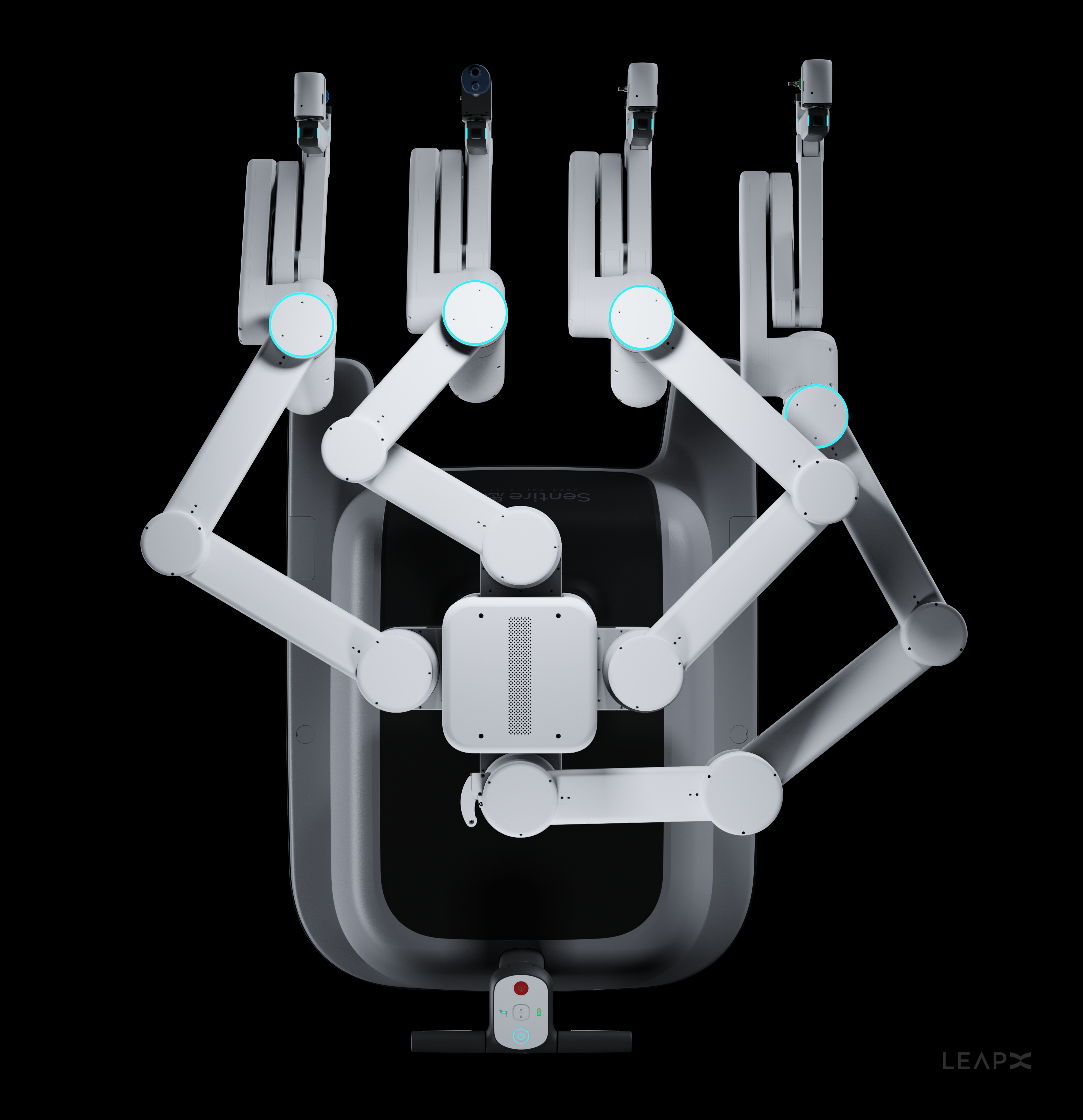
The patient operation platform is equipped with four mechanical arms, which is equivalent to the extension of the doctor's hand. One of the mechanical arms is equipped with an endoscope at the end to extend into the patient's body to transmit the images of the body back to the doctor's console. The other mechanical arms are equipped with surgical tools at the end to synchronize the doctor's hand movements of the console to realize cutting, cutting, suturing and other actions.
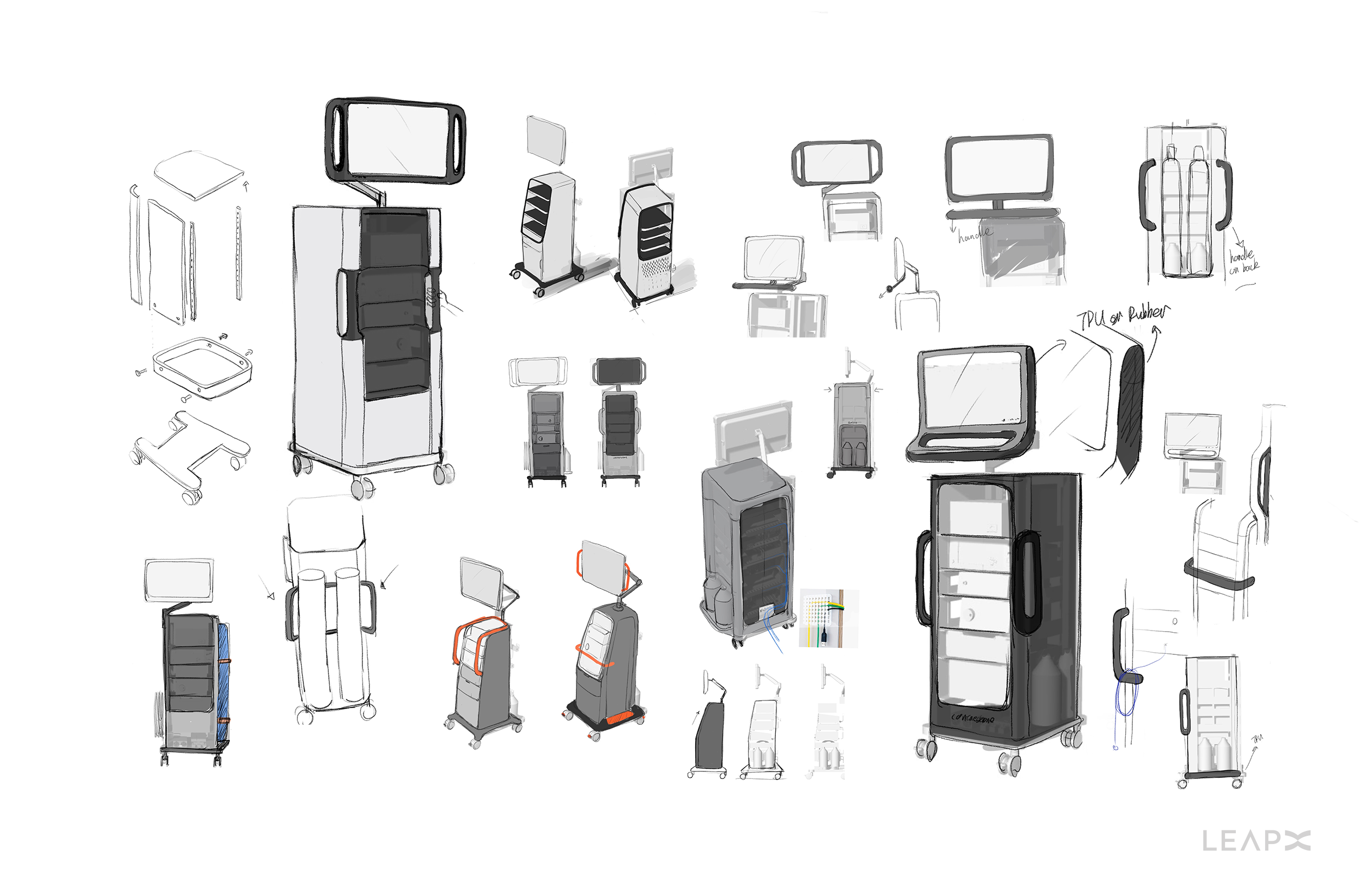
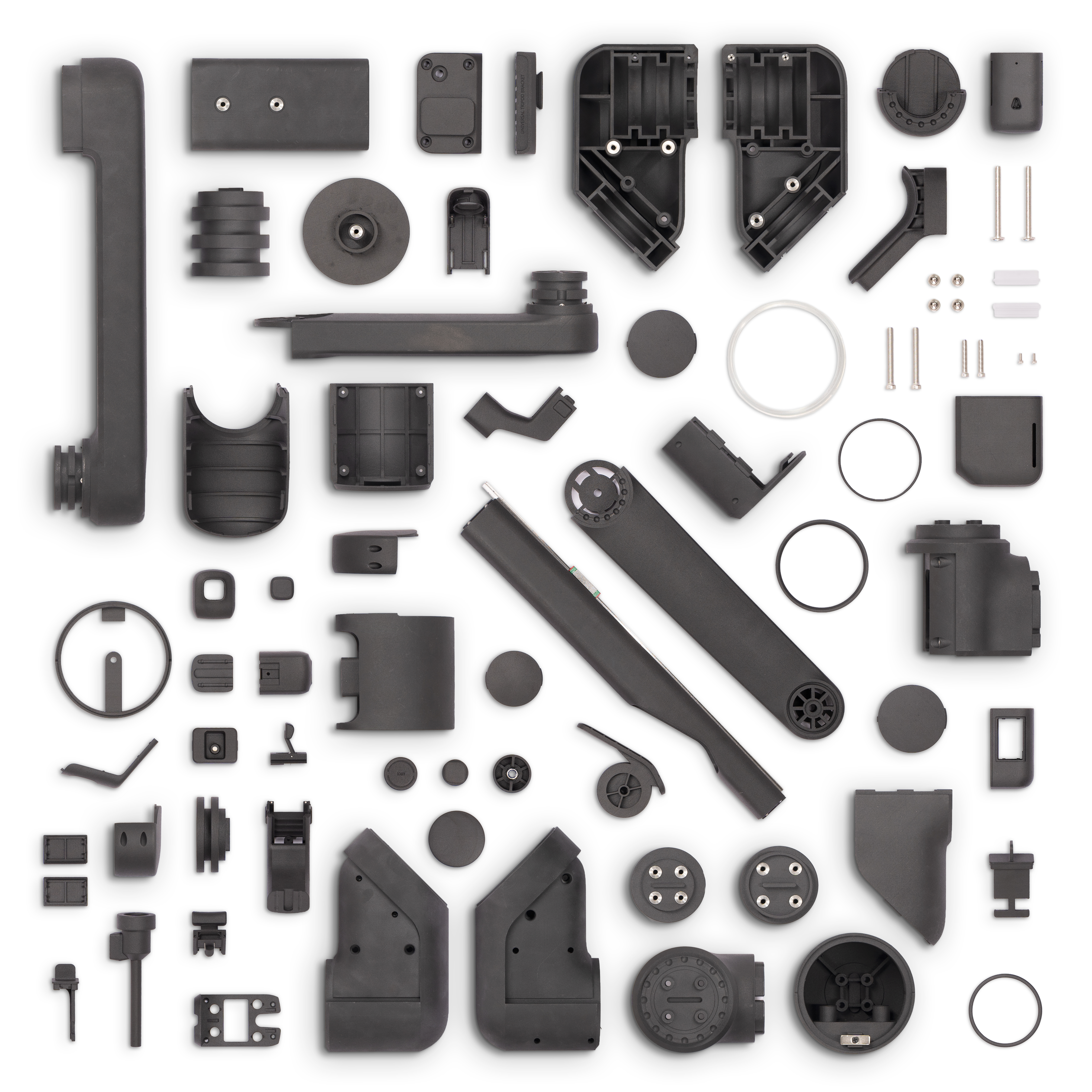
In order to reduce the psychological pressure and fear caused by complex mechanical structure to patients, we decided to use soft curved surfaces and color matching to deal with various parts of mechanical equipment, so that the overall appearance has affinity. At the same time, meticulous local treatment makes it professional.


Before the operation, the medical staff will push the patient's surgical platform to the reasonable position required by the operation. The nurse only needs to gently push the lever in the direction of the target to easily move the entire patient surgical platform, so as to achieve accurate positioning of the operating table.

Based on the operation needs and habits of doctors and nurses, we have designed the keys, unlocking mechanisms, indicator lights and signs of the patient operation platform, making it visually intuitive and intuitive to use, reducing the possibility of false touch and misoperation, and making the operation process of medical staff more smooth and orderly.

Preoperative medical staff will sterilize and disinfect the operation area, and will install the sterile curtain on the patient's operation platform to avoid contamination of the machine and the patient. Therefore, we specially designed the corresponding magnetic attraction position for the sterile curtain to ensure that the sterile curtain can be installed correctly and avoid falling off during the operation.

Nurses need to swing the four mechanical arms to the corresponding positions to connect with the puncture device. For this reason, we have set up unlocking buttons for orientation adjustment at the top and bottom of the insertion arm that are convenient to reach, and have prompt lights and prompt sounds at adjacent positions to facilitate nurses to know the state of the mechanical arms during operation.

Nurses will install different surgical tools according to surgical requirements. We have mellow the tools so that nurses can hold them better when installing.


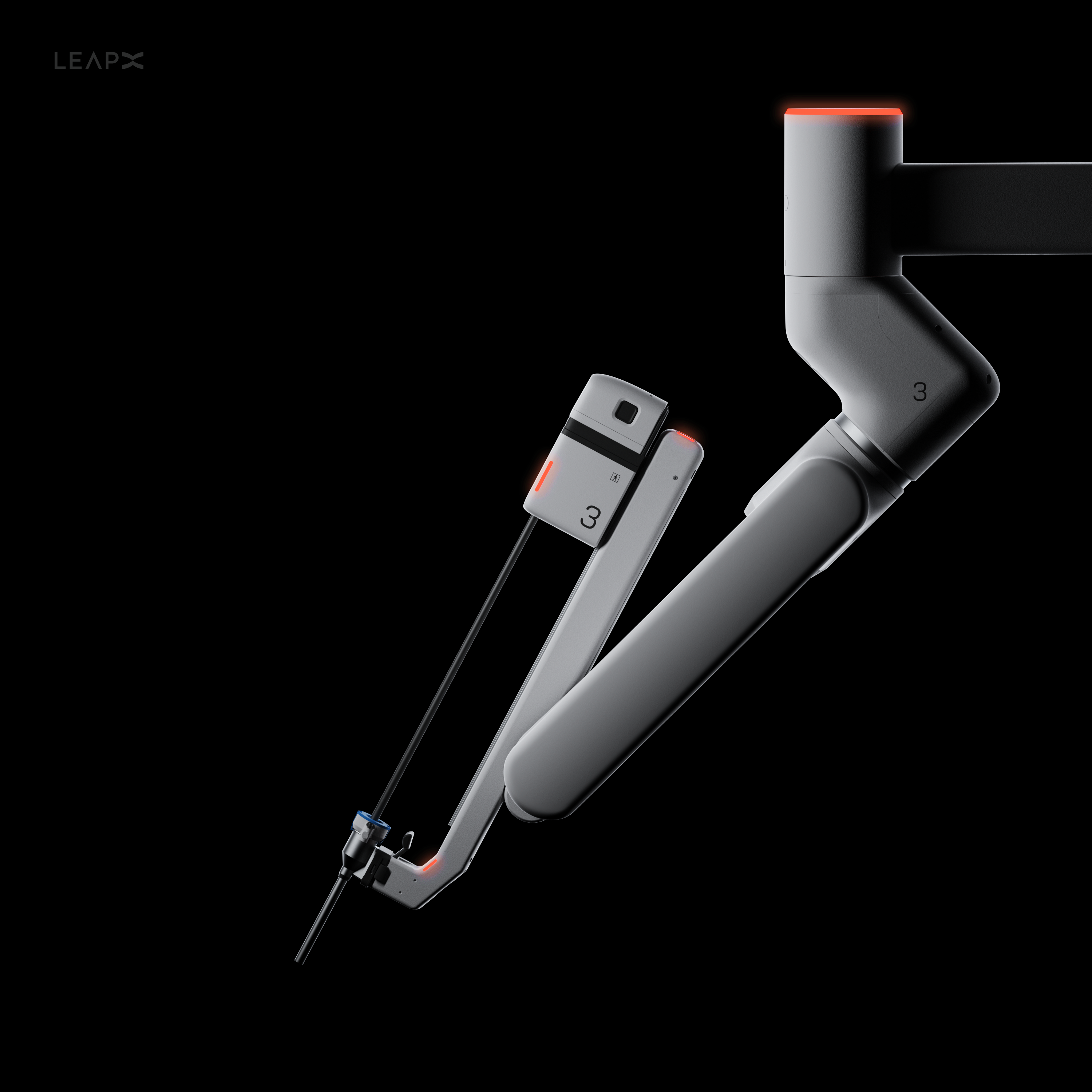
In order to ensure that the nurse can clearly see the state of the robot arm in any position, we have arranged indicator lights in different directions of the robot arm.



The image processing platform is equipped with a touch screen, which can display the endoscope image and the configuration and status of the machine in real time, so as to facilitate the auxiliary personnel to cooperate with the main surgeon to carry out the corresponding operation.
When the equipment is in place and the patient enters the anesthesia state, the doctor can detect the patient's physical signs and data at all times.



The doctor's console is the control platform used by the surgeon to manipulate the robotic arm for surgery. The console displays the 3D image of the patient's body in real time through the 3D display, and is used to accurately capture the complex surgical actions of the surgeon's hands through the left and right seven-degree-of-freedom main hand operating arms, which are mapped to the surgical instruments on the patient's surgical platform through the control algorithm. The doctor also has a set of pedals under his feet to switch modes, change tools, adjust endoscope functions, and trigger electrocoagulation and electrocutting of surgical instruments.






On the premise of meeting the requirements of facial ergonomics and avoiding the air path, we will design the mask close to the face as smooth and round as possible to reduce the discomfort of doctors, and make this area into matte black to reduce the reflection of ambient light affecting the sight of doctors. We have also added silicone cushions to the forehead so that the pressure on the head can be evenly distributed to the forehead support level.

We have also added an indicator light at the oblique angle of the viewer to show the operating status of the surgeon. The position of the bevel allows nurses to know the status of the surgeon from more angles, reducing communication costs in a more intuitive way.
During the operation, the doctor needs to perform the operation with high precision and high intensity for a long time. Reasonable ergonomic design can not only improve the operation experience of the surgeon, improve the quality of surgery, but also extend the professional life of the doctor, which is very critical for the design of the doctor's console. After rigorous ergonomic research, we have made careful optimization for each adjustable component to minimize the fatigue of doctors.



The surgeon will turn on the console and log in to his account, and adjust the various parts to his comfortable position. We combine the lever of the operation panel with the corresponding part to make the adjustment direction and part clear at a glance.




We also helped design the Cornerstone Robotics (CSR) logo. The following is an effect diagram of some design materials (non-final application materials).



After 4 years, Siteng surgical robot has completed 100 multidisciplinary human clinical trials. At present, the first generation of Sentire Siteng surgical robot independently developed by Connor Steng has been approved by NMPA for listing, and plans to be listed on the global scale, serving global health care, and officially put into clinical application. At present, a large number of clinical trial data have proved that surgical robots have the advantages of fine and complex operations in narrow spaces, and play an increasingly important role in the market of endoscopic surgical robots.

There is a wonderful design story behind every photo. After that, we will publish an article on the entire project design process, which will include more design inspiration and behind-the-scenes highlights, so stay tuned.
Industrial Design: Deng Yumian | Siyoon Kim | Chen Kaihuang | Wei Feng Barney Mason | Chao Ang | Kong Deheng
Engineering R & D: Connorthten Team
Brand design: Katrina Wang

The copyright of this work belongs to LEAPX Design. No use is allowed without explicit permission from owner.

New user?Create an account
Log In Reset your password.
Account existed?Log In
Read and agree to the User Agreement Terms of Use.
Please enter your email to reset your password




Too strong!
There is a minimally invasive robot in Shanghai, and it looks like this!
How to contact.
I don't understand, but it's awesome.
Watching it once a day is eye-catching
Sure enough, the great god's products must be of high quality
LEAPX is the most awesome, not one of them.
Another gold medal.
Leap X is a boutique
After the operation, turn into a robot.
So many pictures to see the climax
Finally, I am looking forward to updating it. after holding back for so long, I have done a big job. ha ha
Handsome
666
really, really good