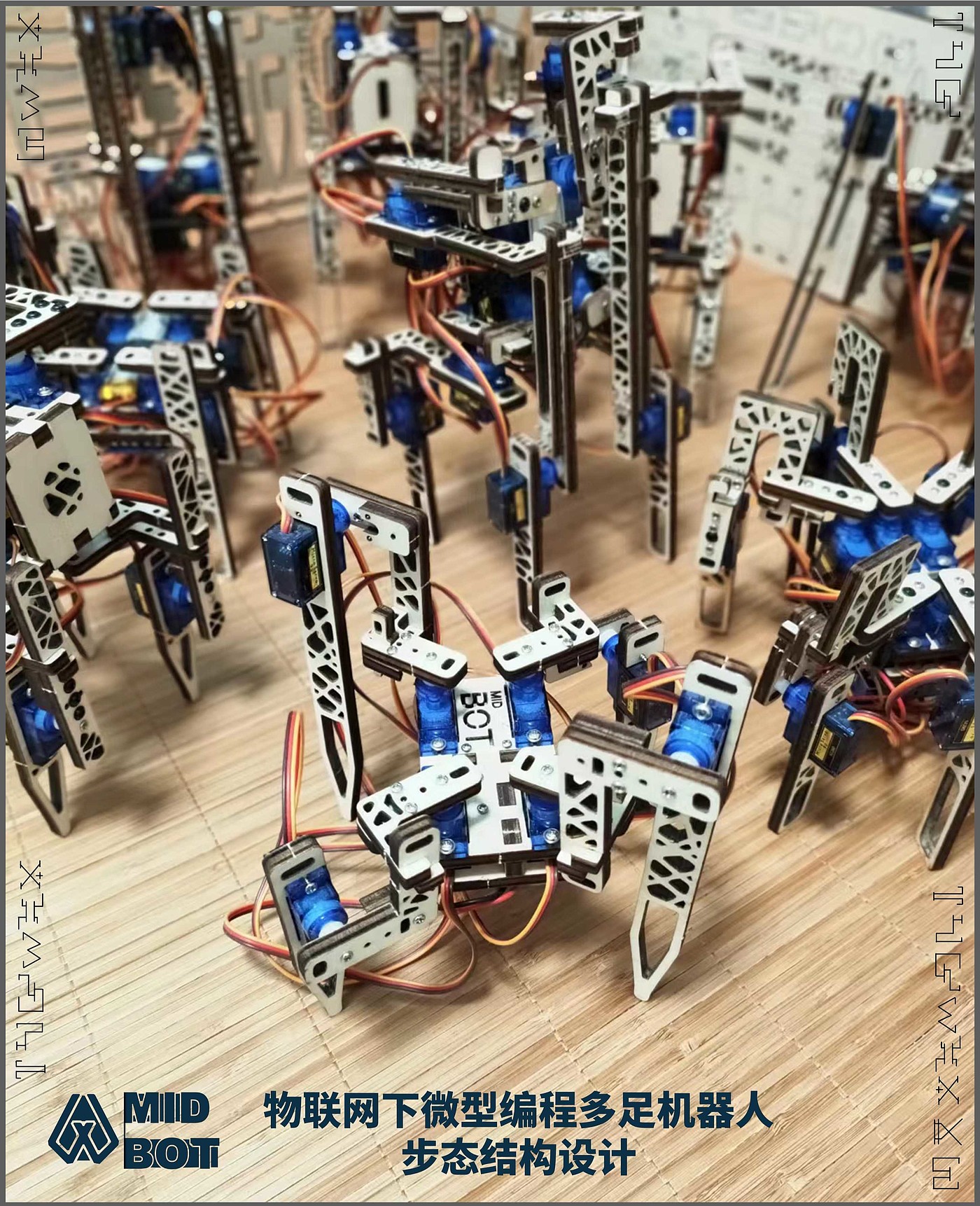
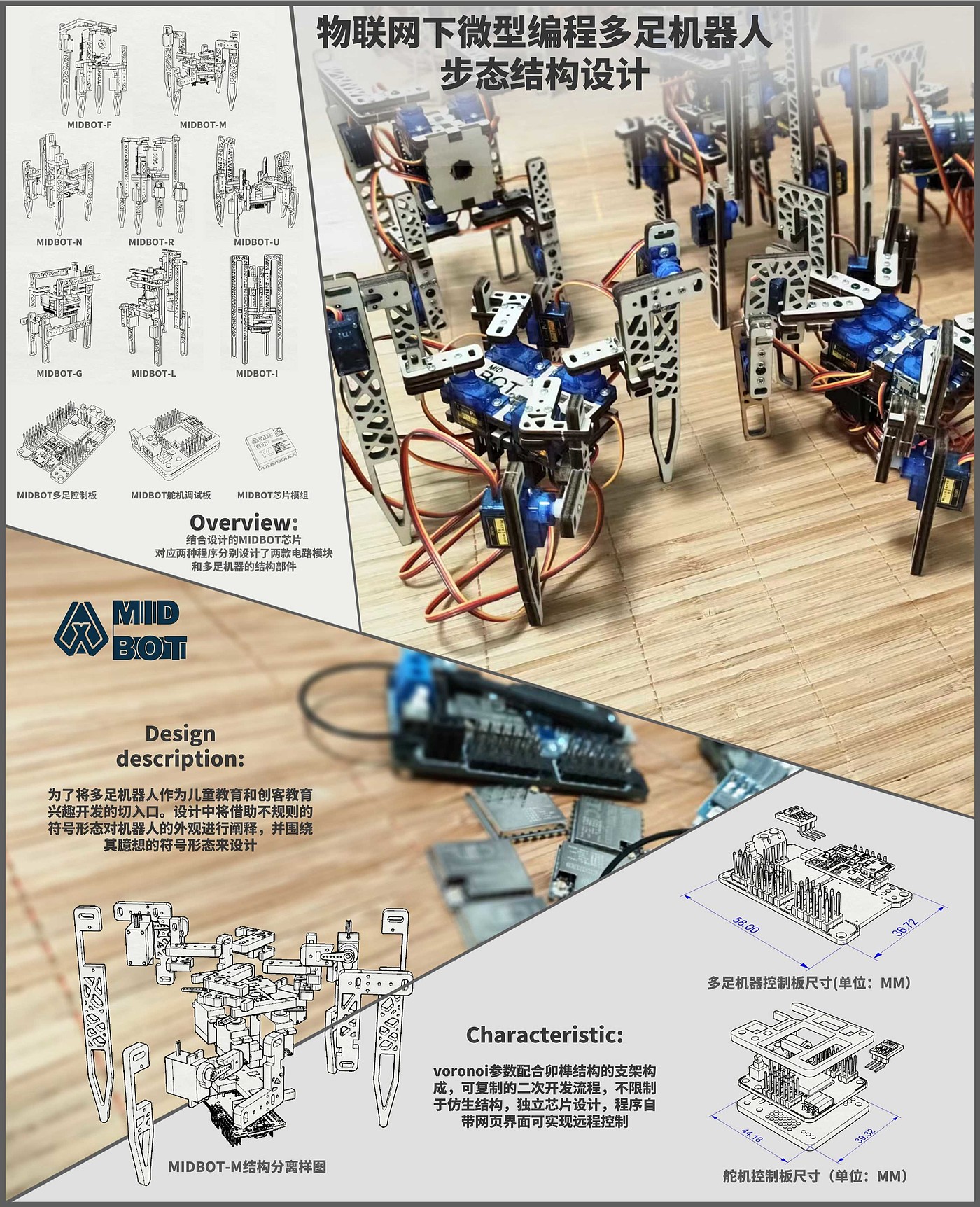
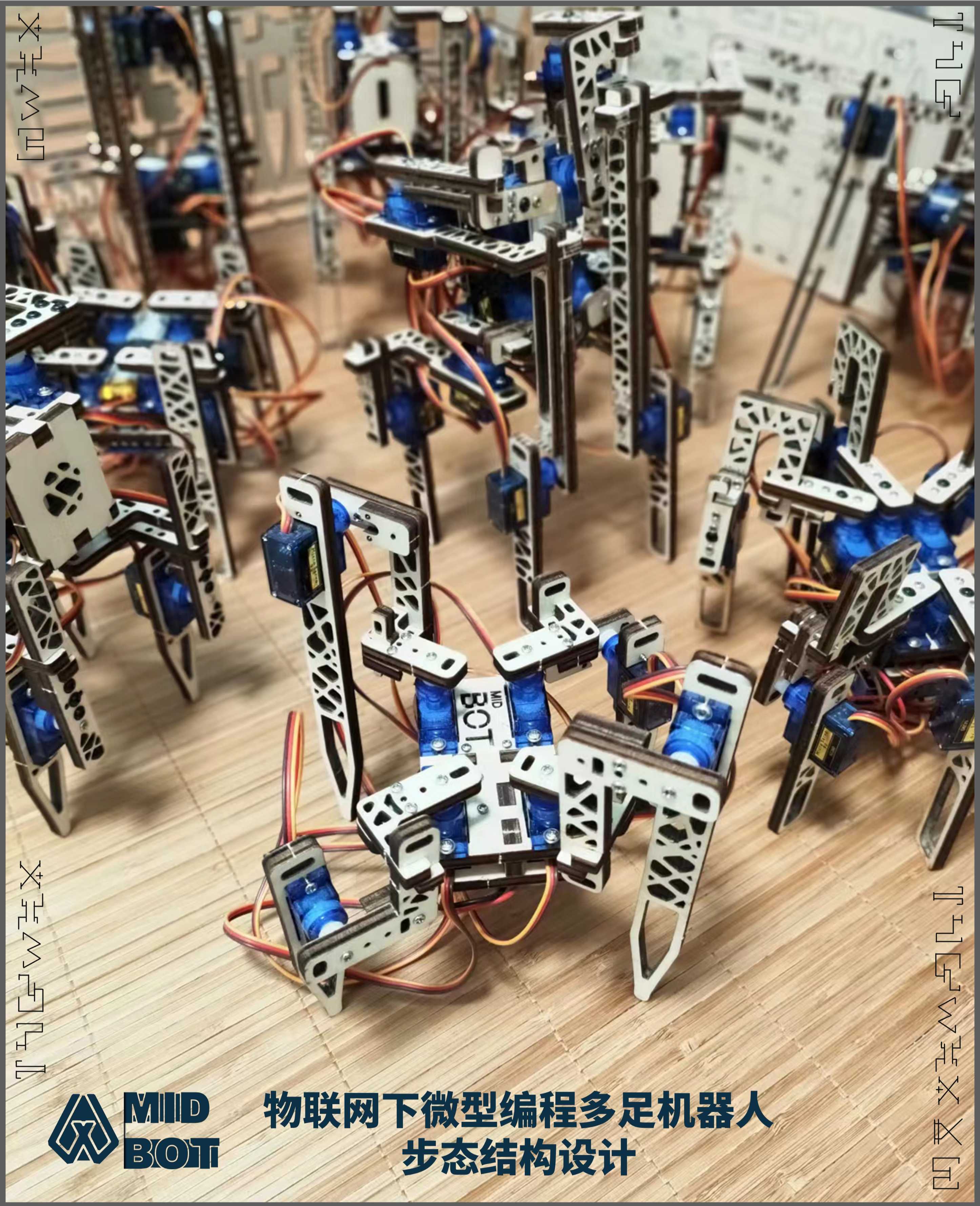
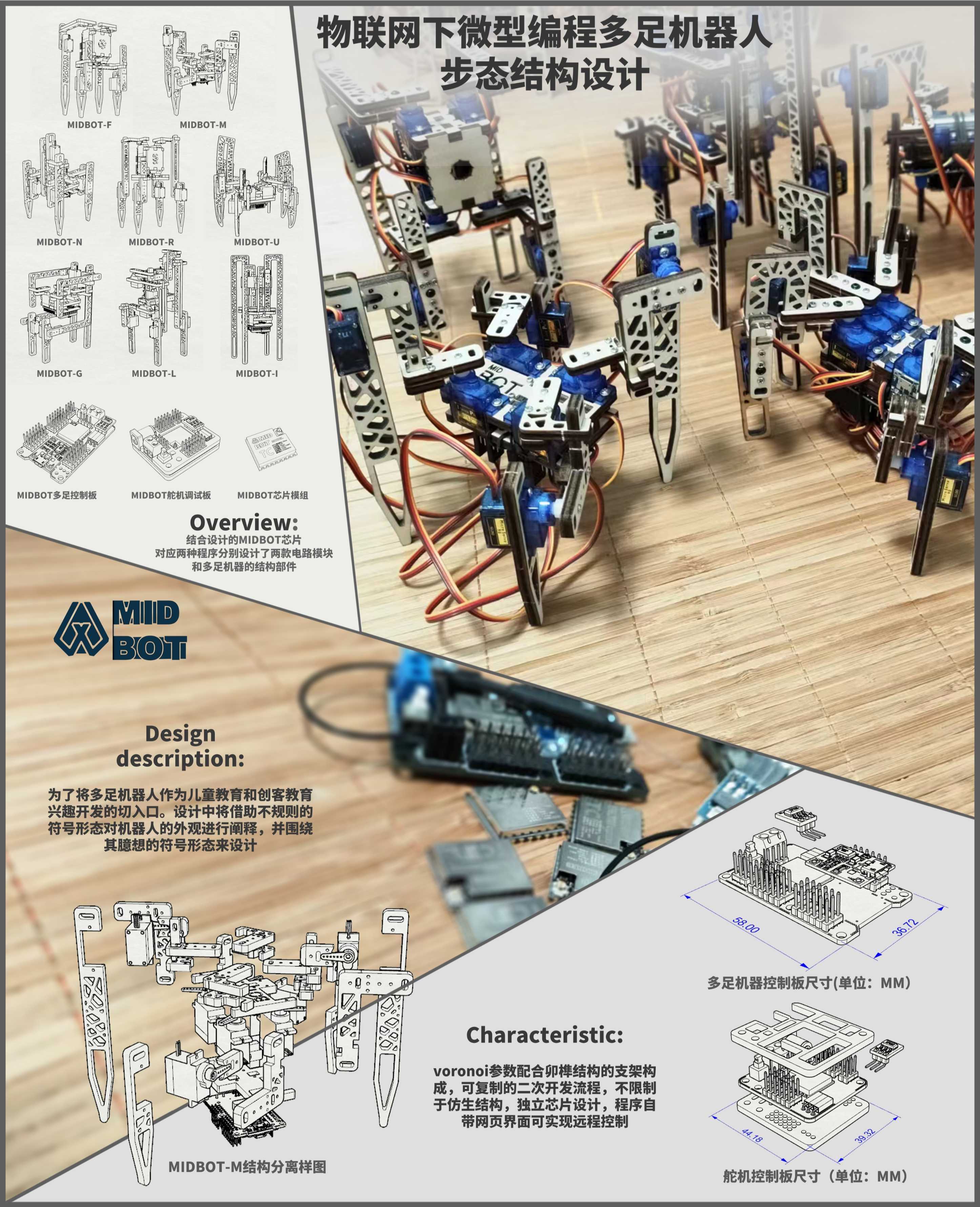
In order to use multi-legged robots as an entry point for children's education and customer education interest development. In the design, the appearance of the robot will be explained with the help of irregular symbol forms, and designed around its imaginary symbol forms, and then combined with its design characteristics to calculate and make gait algorithms, combine the motion algorithm with specific forms, verify the results of simulation motion, and derive more conceptual forms. Laser cutting is adopted, and the structural connection mode of mortise and tenon joint is used. The multi-legged robot control circuit integrated module, combined with the specific structure of the robot, the visual web control interface system is applied to the robot control system to realize multi-legged visual remote control. This paper explores the design of the motion structure of multi-legged robot through linear symbols to meet its effectiveness and structural rationality, and preliminarily explores a set of feasible schemes and processes. It provides verification methods and experimental basis for the development and structural design of multi-legged robots.






It's pretty good.