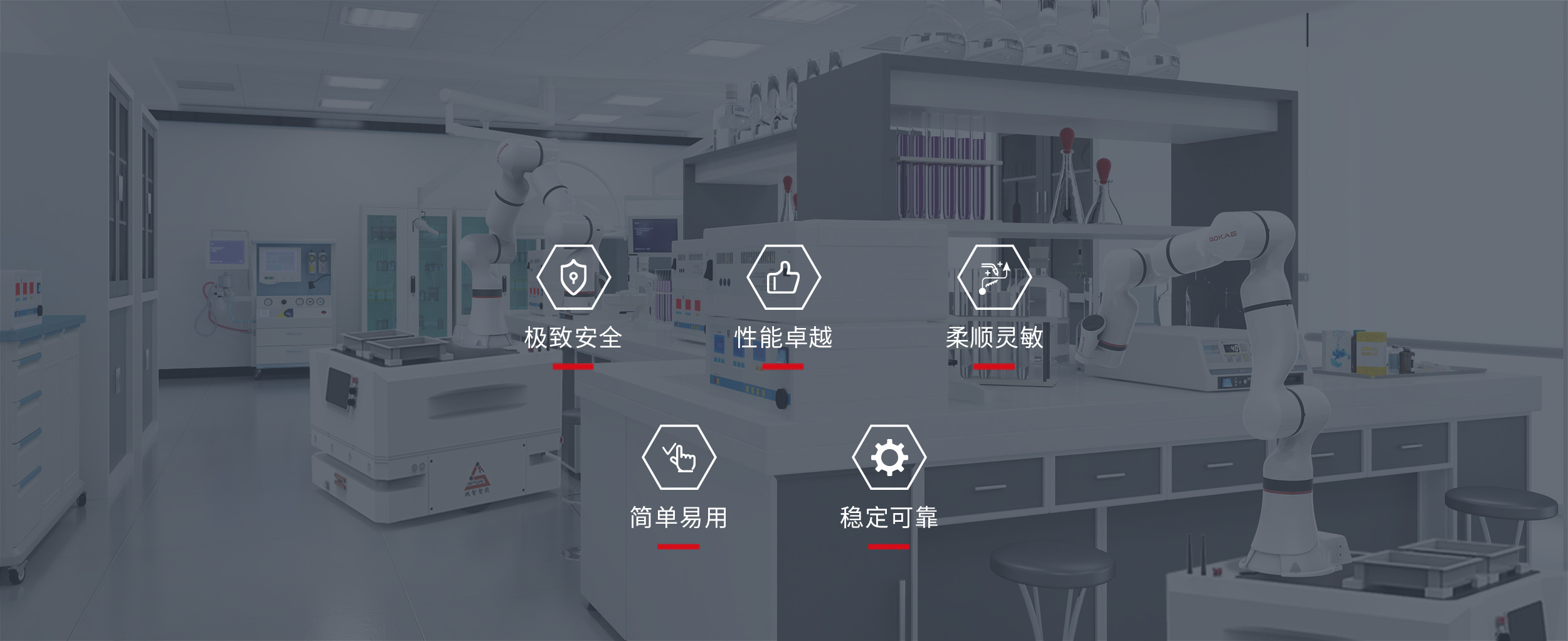
The xMate ER series of flexible cooperative robots adopt a full-joint torque sensor configuration. Through the direct force control technology of full-state feedback, obstacle avoidance is more flexible, collision detection is more sensitive, and it has high dynamic force control and compliance while taking into account the high precision of position control. Control ability.
Practical drag teaching methods and RL programming language provide users with simpler and more comprehensive programming methods, open RCI bottom control capabilities, and meet the needs of high-end users such as education and scientific research, medical treatment, and automated process research and development.
XMate ER has a lofty intention from the initial product design, using the international leading seven-axis independent force control joint and uncontrolled cabinet design technology, compact internal structure, integrated lightweight body, full of aesthetic appearance design, from the body It gives xMate ER better safety, flexibility and lightness in human-computer interaction. The pioneering product performance and a wide range of application fields not only successfully break through in the fierce market competition, but also lead the development trend of robot technology and the direction of update iteration.
Award Information: RedDotWinner2021
ROKAE, Luoshi Robot






Good
First-class bar
It's already on the market.
Nice look👍
Or physical photos will do.
Is there a video?
Something