Author: Zhang Kaiyue
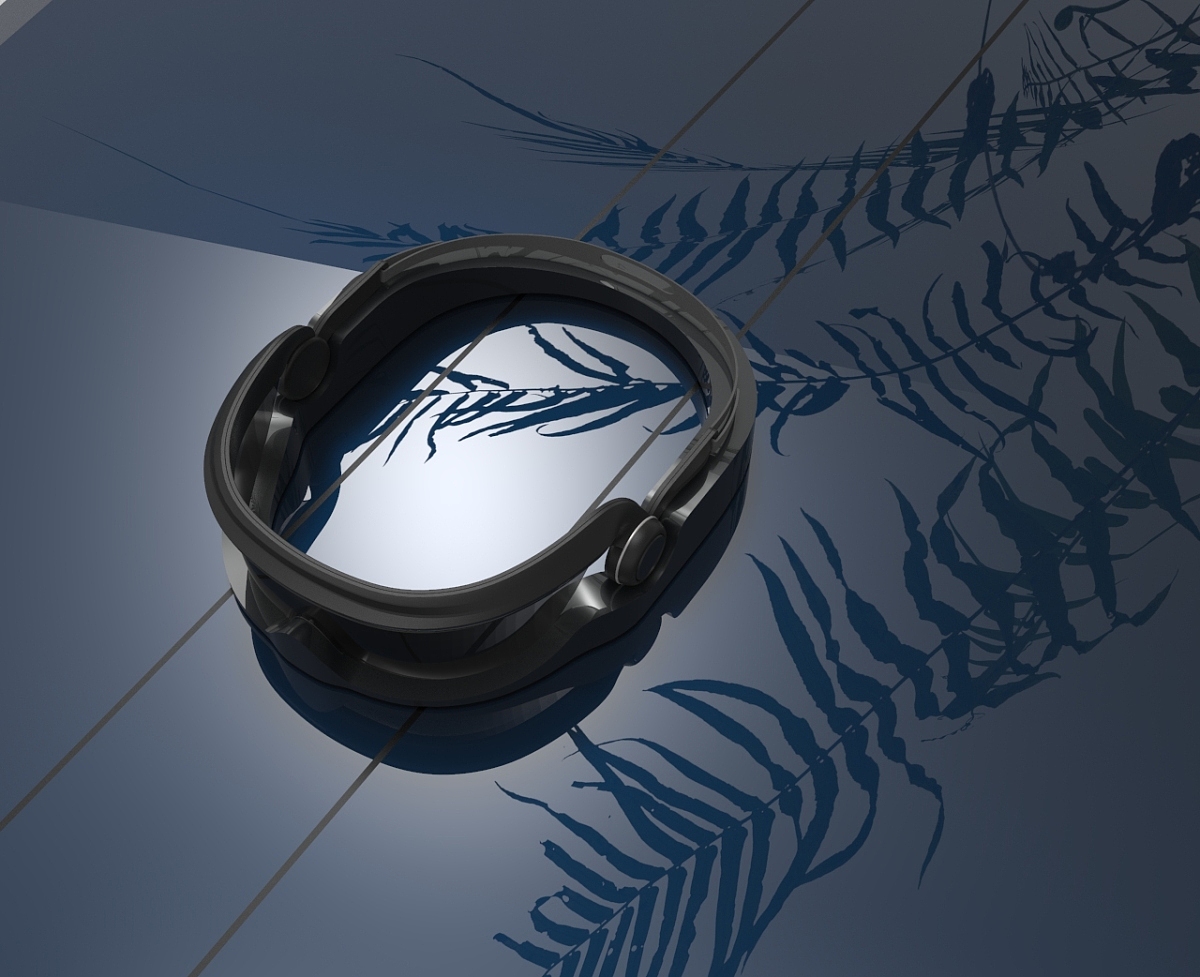
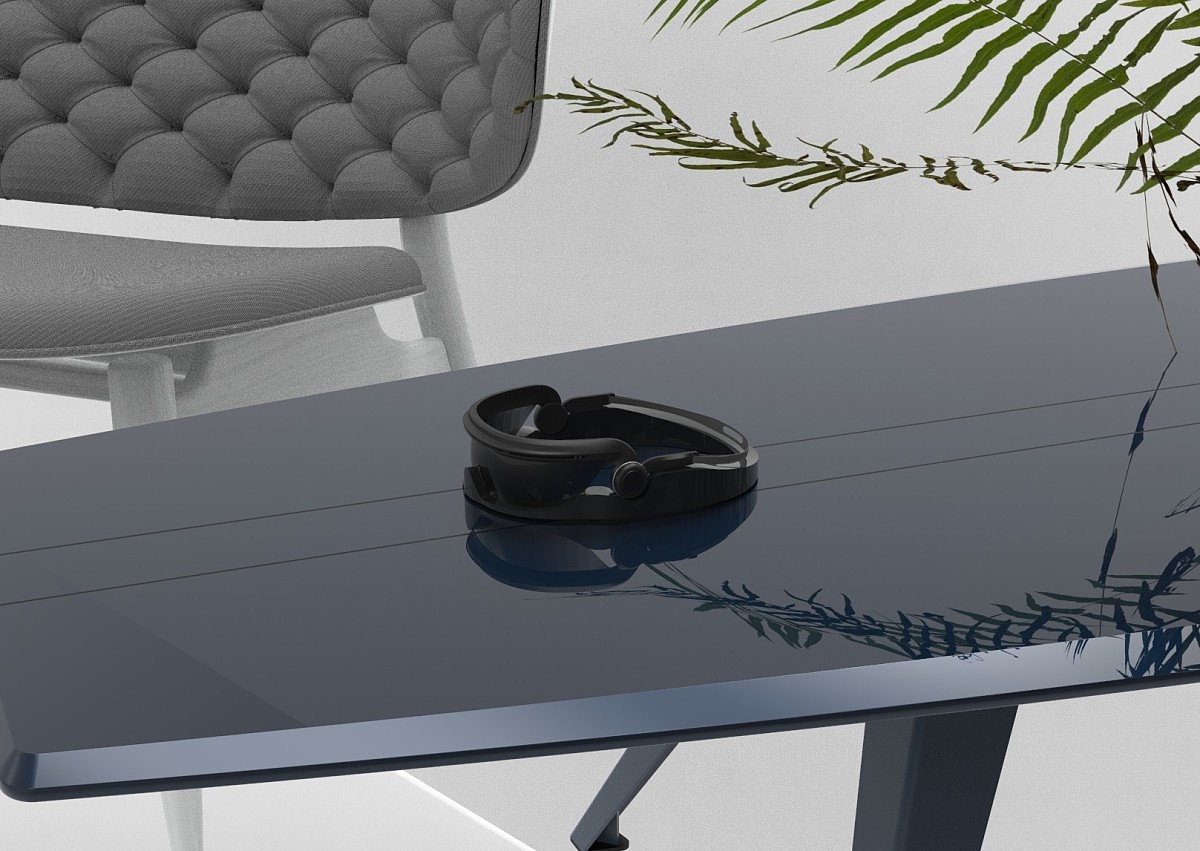
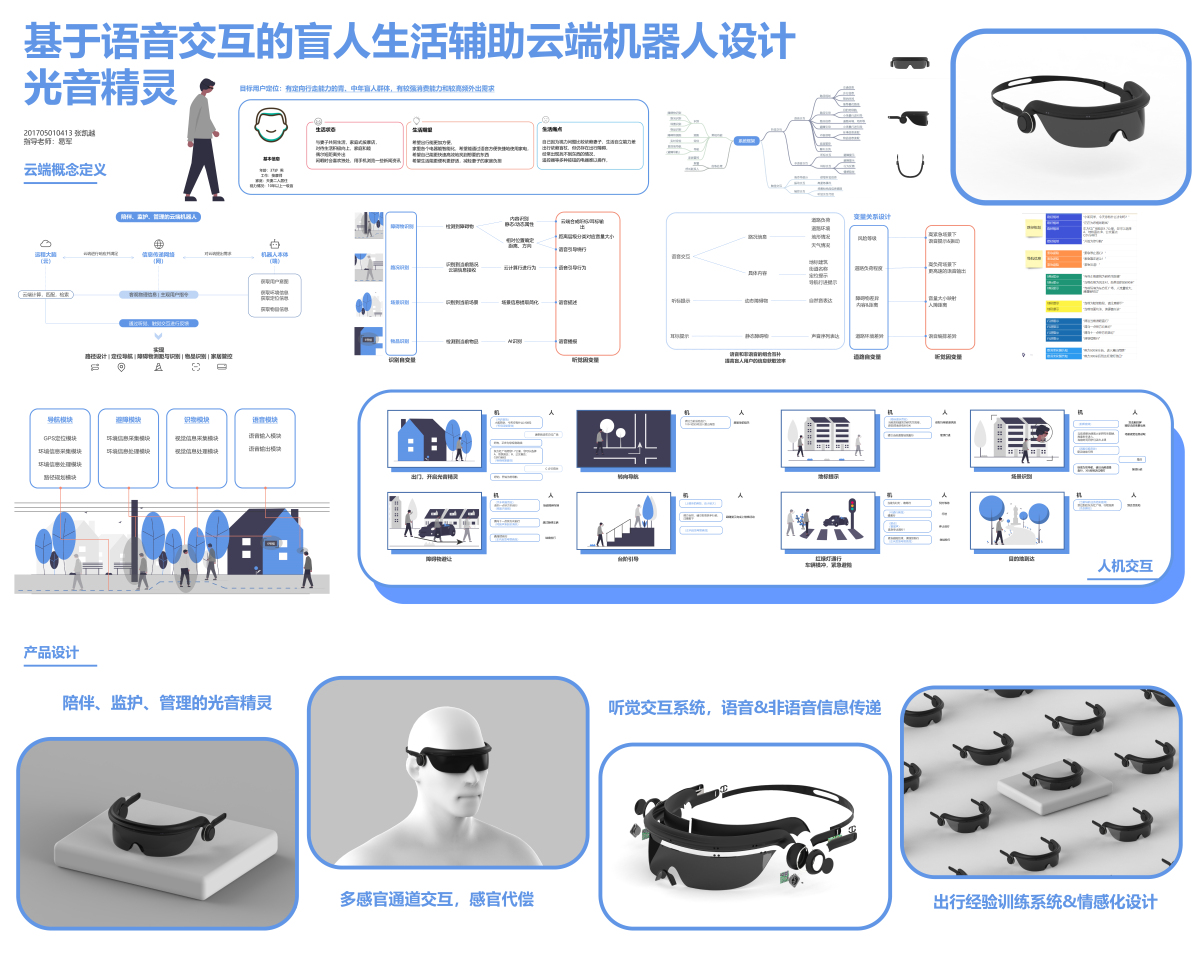
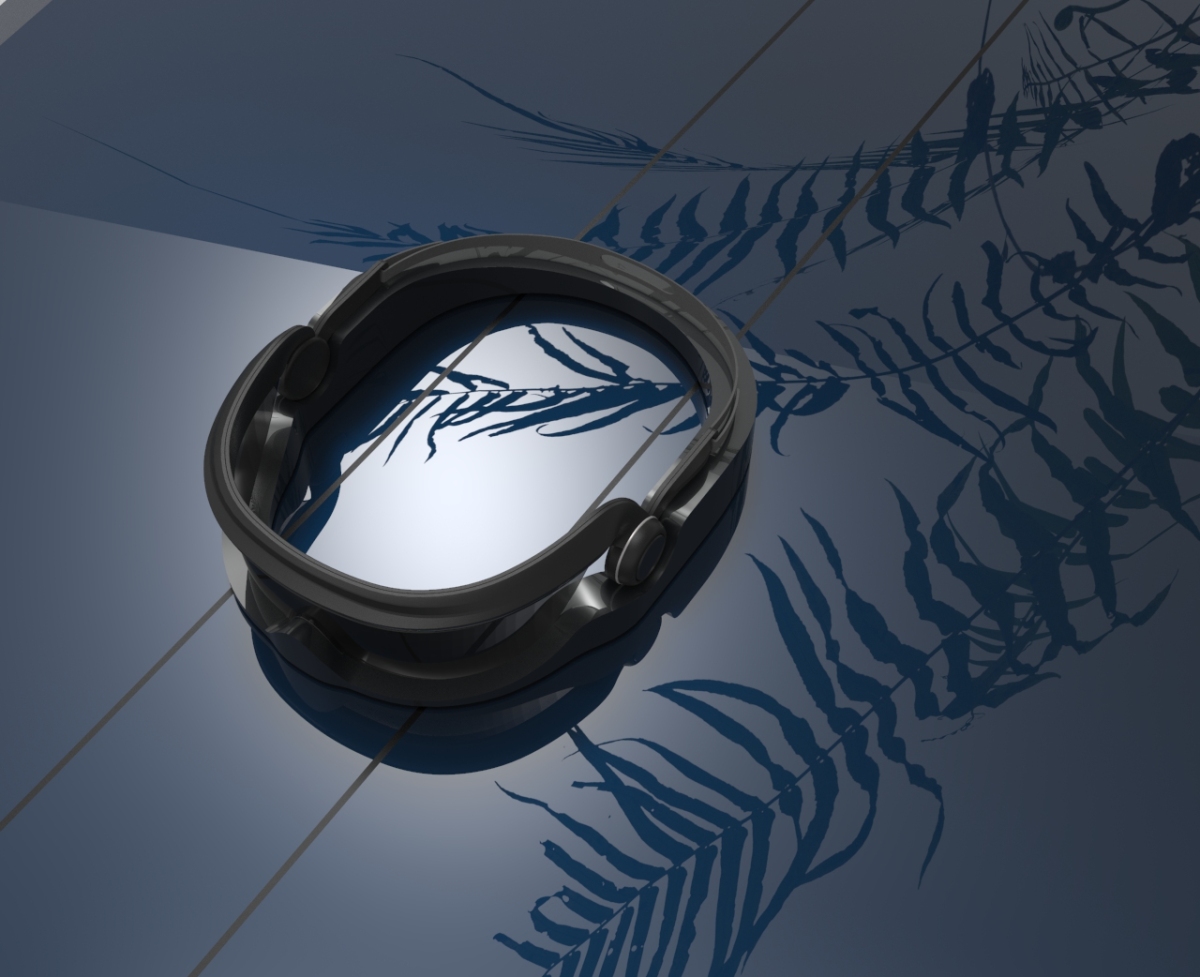
Introduction: The subject comes from the independent research and development project of the School of Robotics of Hunan University. Through the investigation and analysis of the practical living conditions of the blind, the use of new technologies and new methods to develop intelligent robots to assist the daily life needs of the blind, and try to reduce the practical difficulties of such people. Through the diversified expression of auditory interaction and multi-channel interaction design, the functions of path design, positioning and navigation, obstacle ranging and recognition, object recognition, and home control are realized to meet the basic life needs of the blind in the visually impaired situation. Provide multi-functional, unobtrusive and personified life-assisted robots for the blind in multiple scenes to provide guidance for the blind's life scenes and establish a sense of travel security.
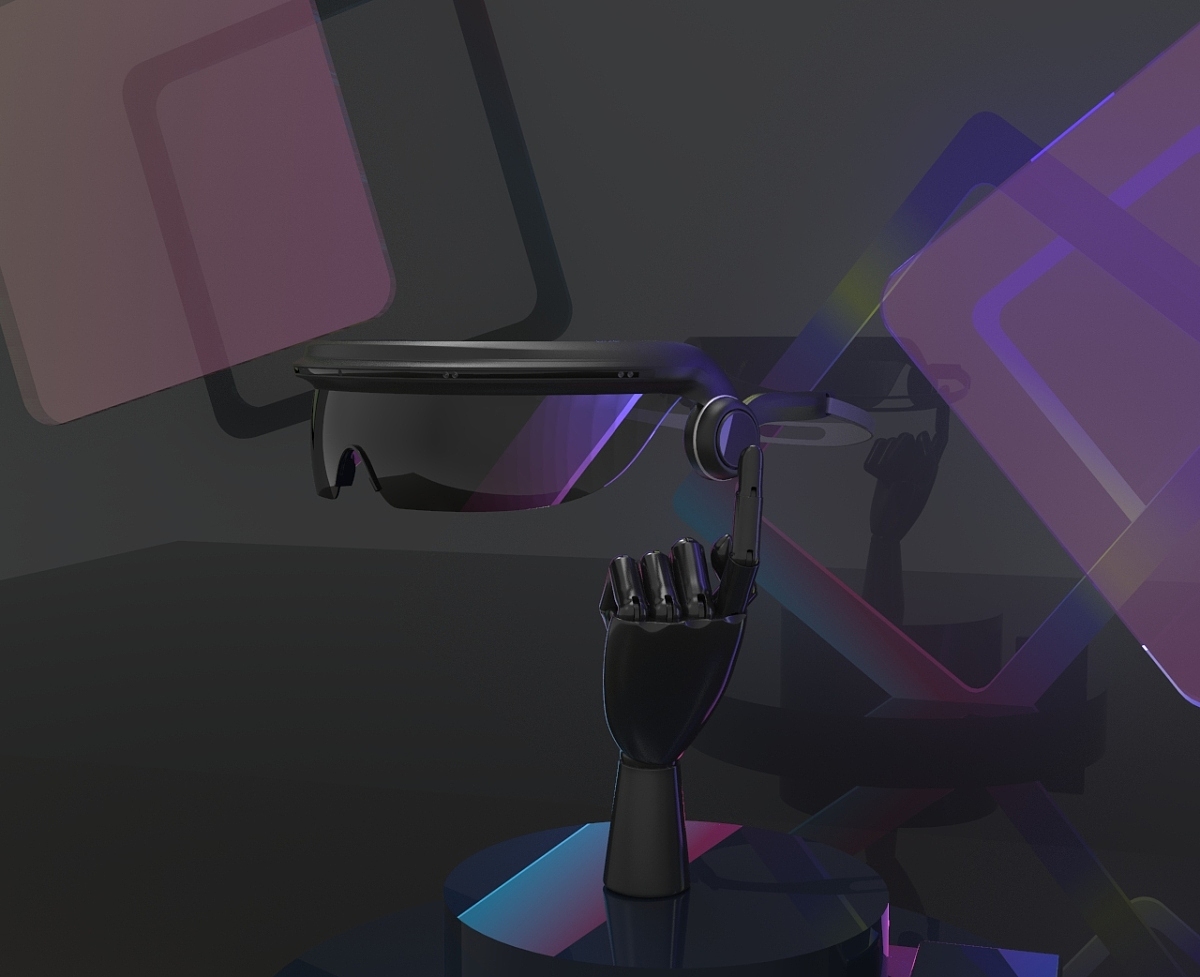
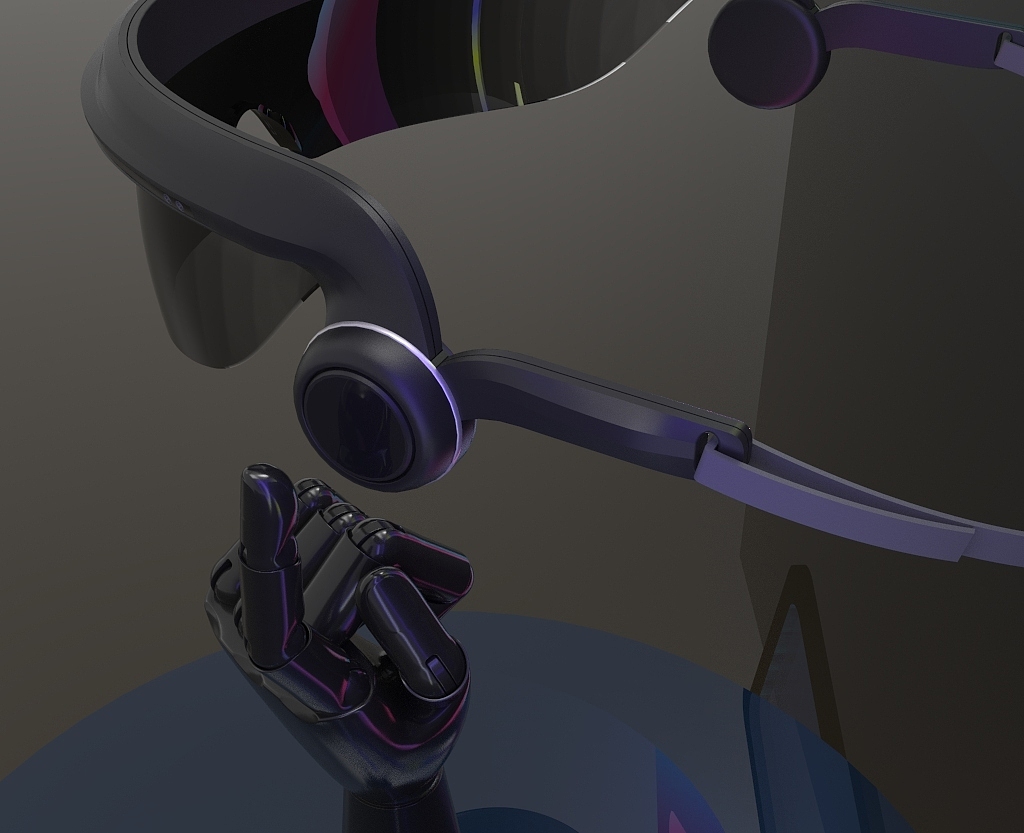
Propose a cloud robot that accompanies, monitors, and manages, obtains user intentions and environmental information through the robot body, and puts forward requirements to the cloud through the information transmission network. The remote brain is computationally matched to provide users with auditory and tactile interaction to achieve high-risk, Dynamic, high-degree-of-freedom mobile scenes make up for the channel for blind group vision to obtain information, and use other senses such as hearing and touch to cooperate with the blind to receive prompt information, so that they have the ability to continuously obtain information from the environment, and integrate this information with existing knowledge to form a complete and unified psychological representation. Ability to understand, integrate and analyze environmental information. Through the prompt of cloud robot to environmental information, the knowledge system of blind people's travel experience is constructed, and the perception, understanding and prediction of environmental elements of blind people are improved. In the aspect of auditory interaction, different information in the environment is mapped in the way of combining voice signals and non-voice signals, so as to construct the classification of environmental information hierarchy by the blind and improve the auxiliary efficiency of the blind.



Original link: https://pinwall.cn/project/37493









Comment Board (0)
Empty comment