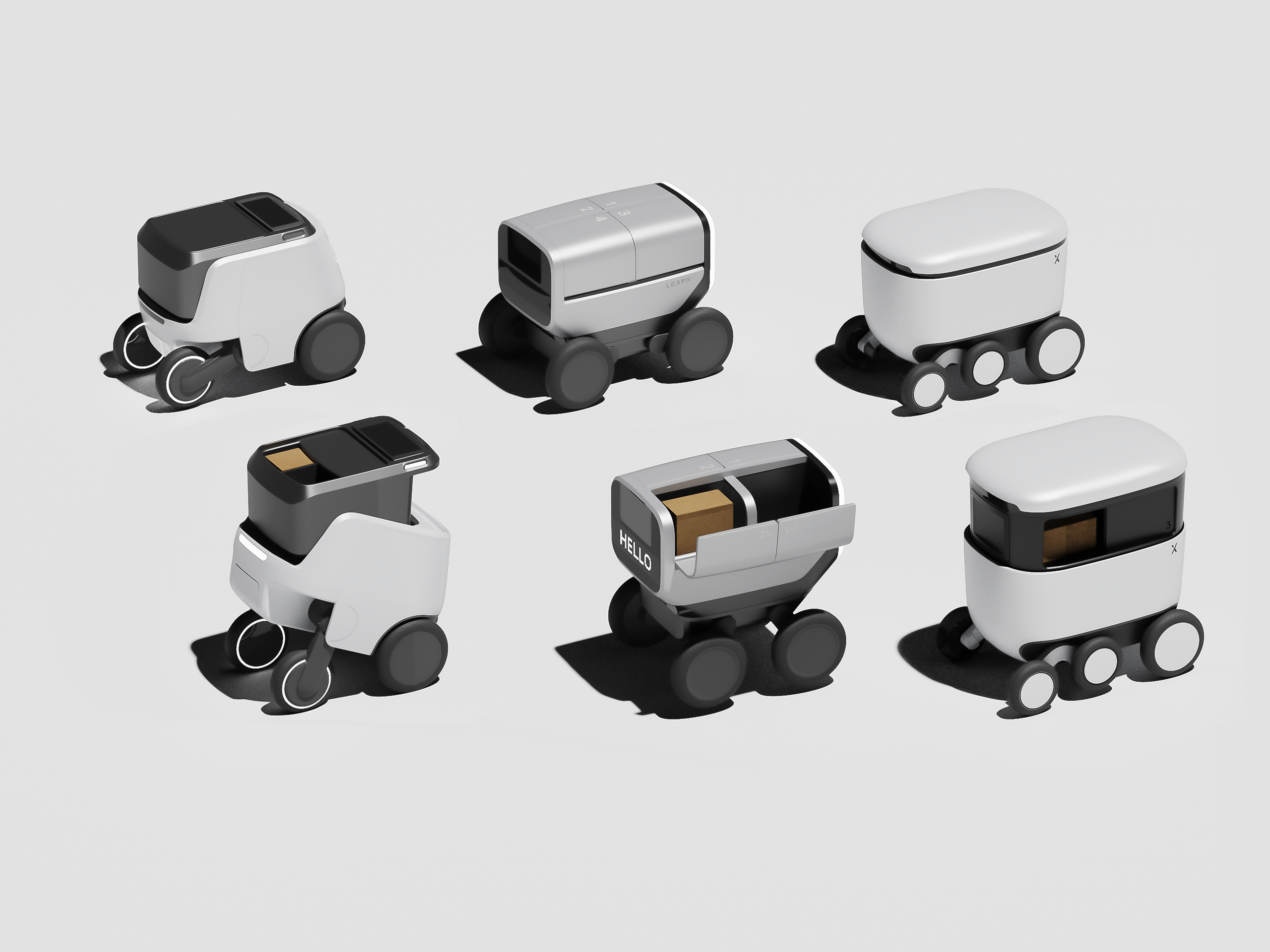
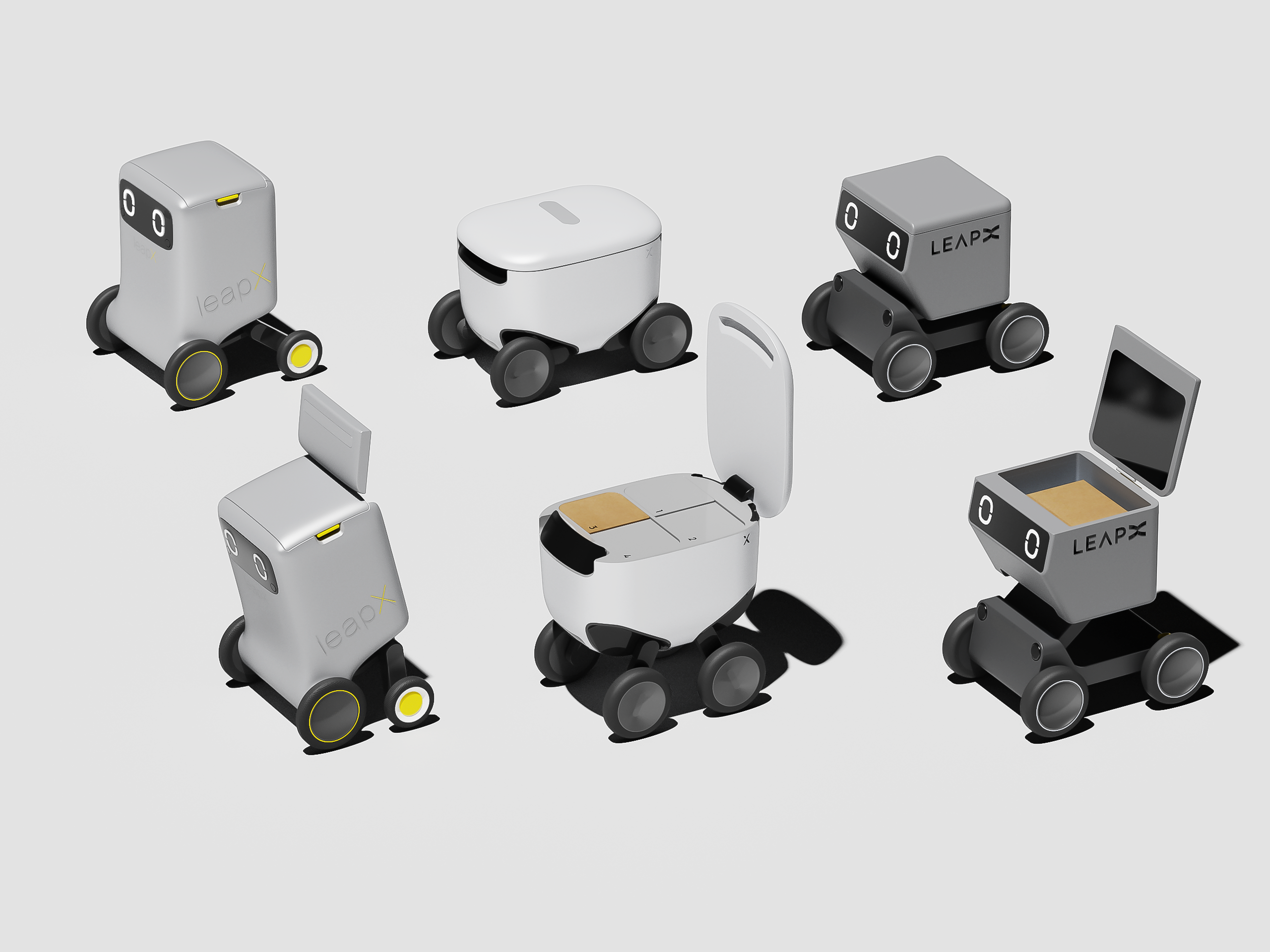
At the beginning of 2019, shortly after LEAPX was established, we received a forward-looking project to reimagine the possibility of unmanned distribution: at present, unmanned distribution robots/distribution vehicles are divided into indoor and outdoor types, each performing its own duties, while our customers are deeply intelligent and have high goals, hoping to design an unmanned distribution robot to open up indoor and outdoor scenes, let the distribution robot be able to deliver goods and takeout directly from the merchant to the user's door.

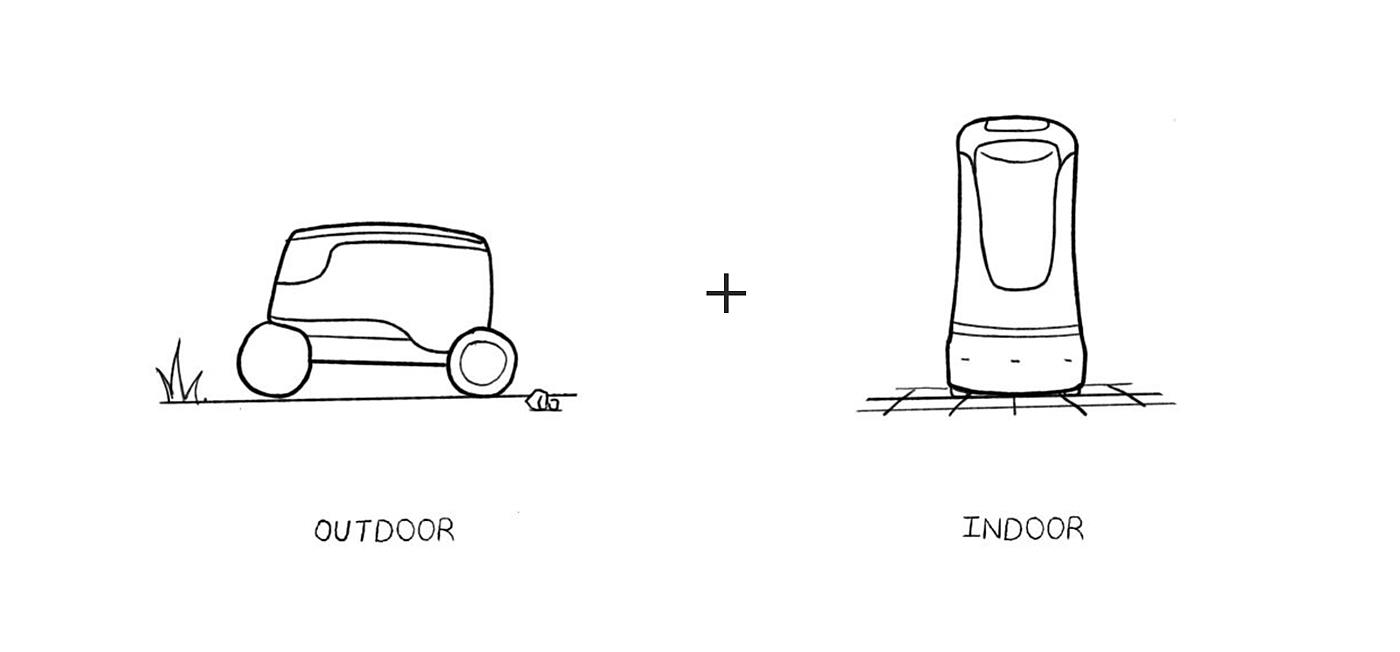
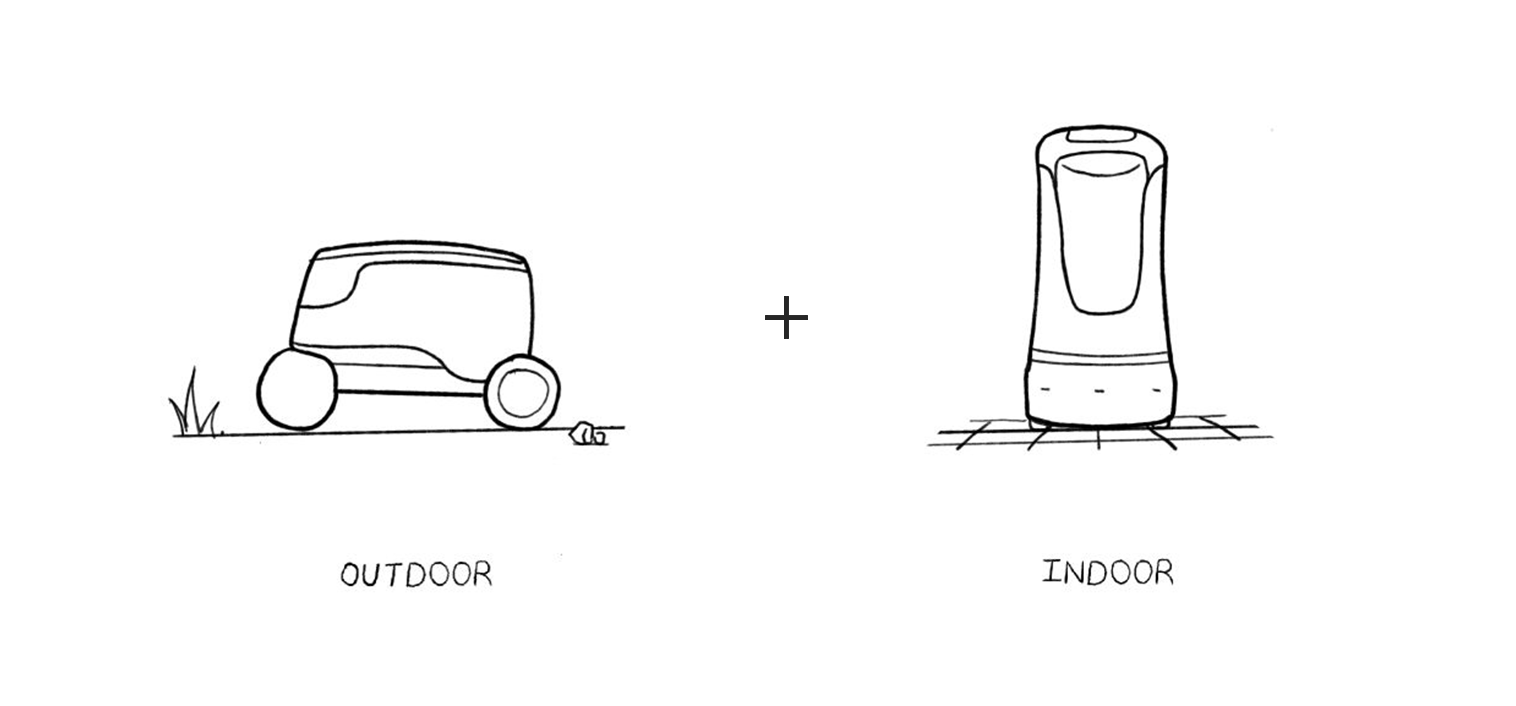
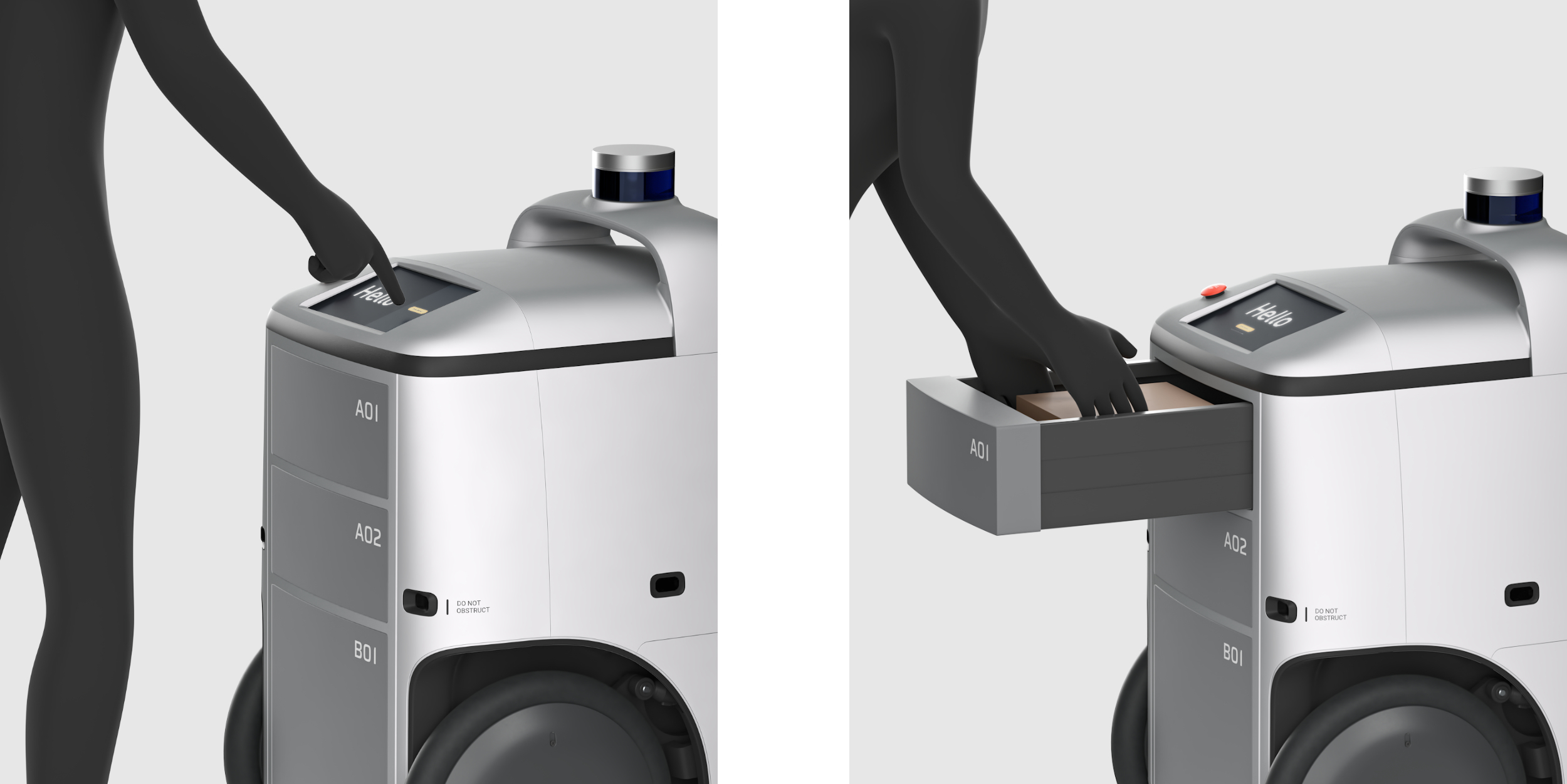
Outdoor unmanned distribution vehicles, in order to be able to drive at high speed and stably on complex outdoor road conditions, generally have a low center of gravity, a relatively long wheelbase, and a relatively large wheel diameter. This also leads to a large area of the car, a large turning radius, and inflexibility, which is a big obstacle to driving indoors. In order to facilitate the flexible passage of crowded rooms and elevators, indoor unmanned distribution robots generally occupy a small area and have a high height, which is convenient for users to take goods. And this kind of high center of gravity and small wheelbase structure makes it difficult for this kind of robot to move in outdoor road conditions. How to balance these two conflicting needs has become the key to the project.
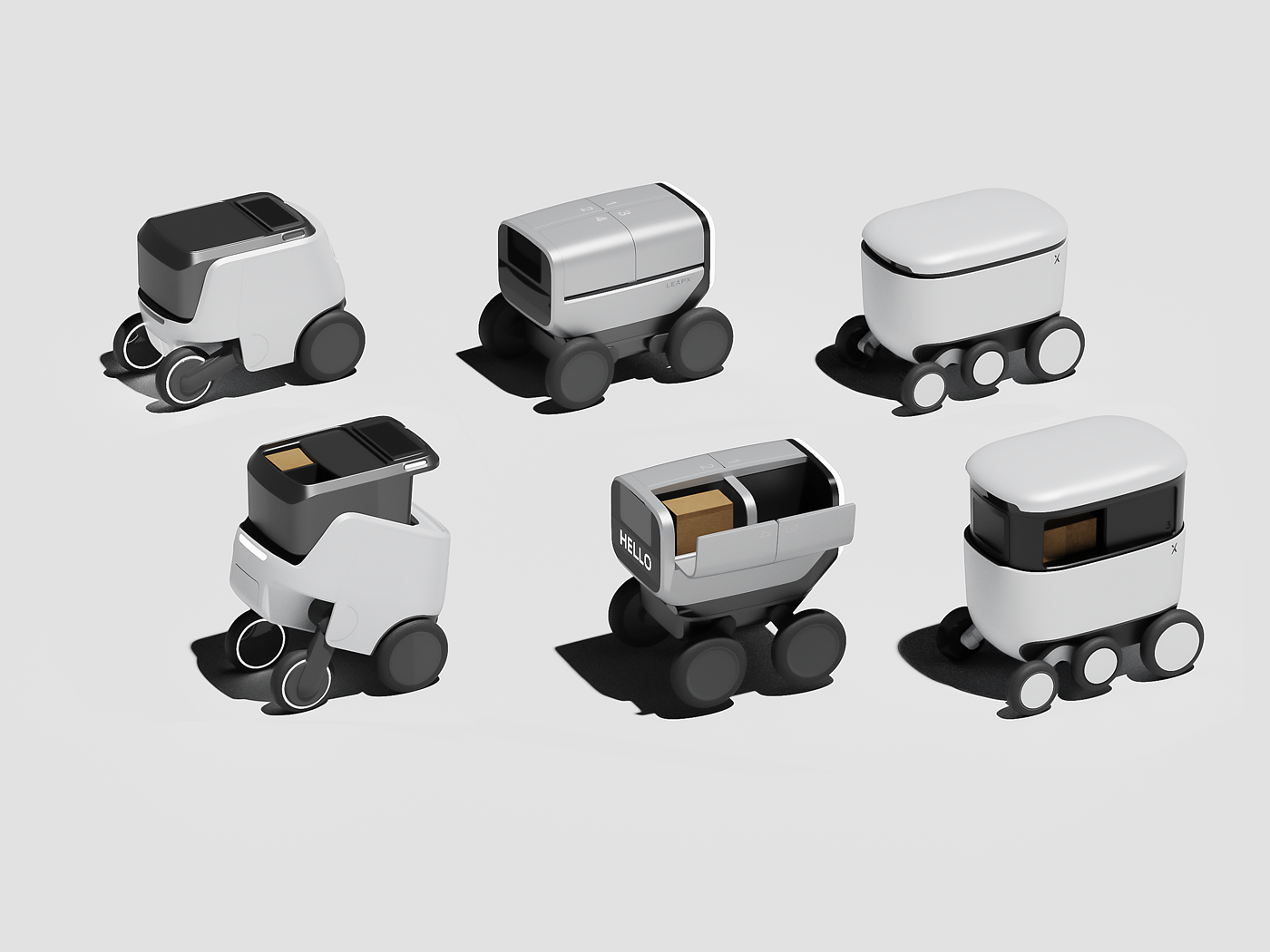




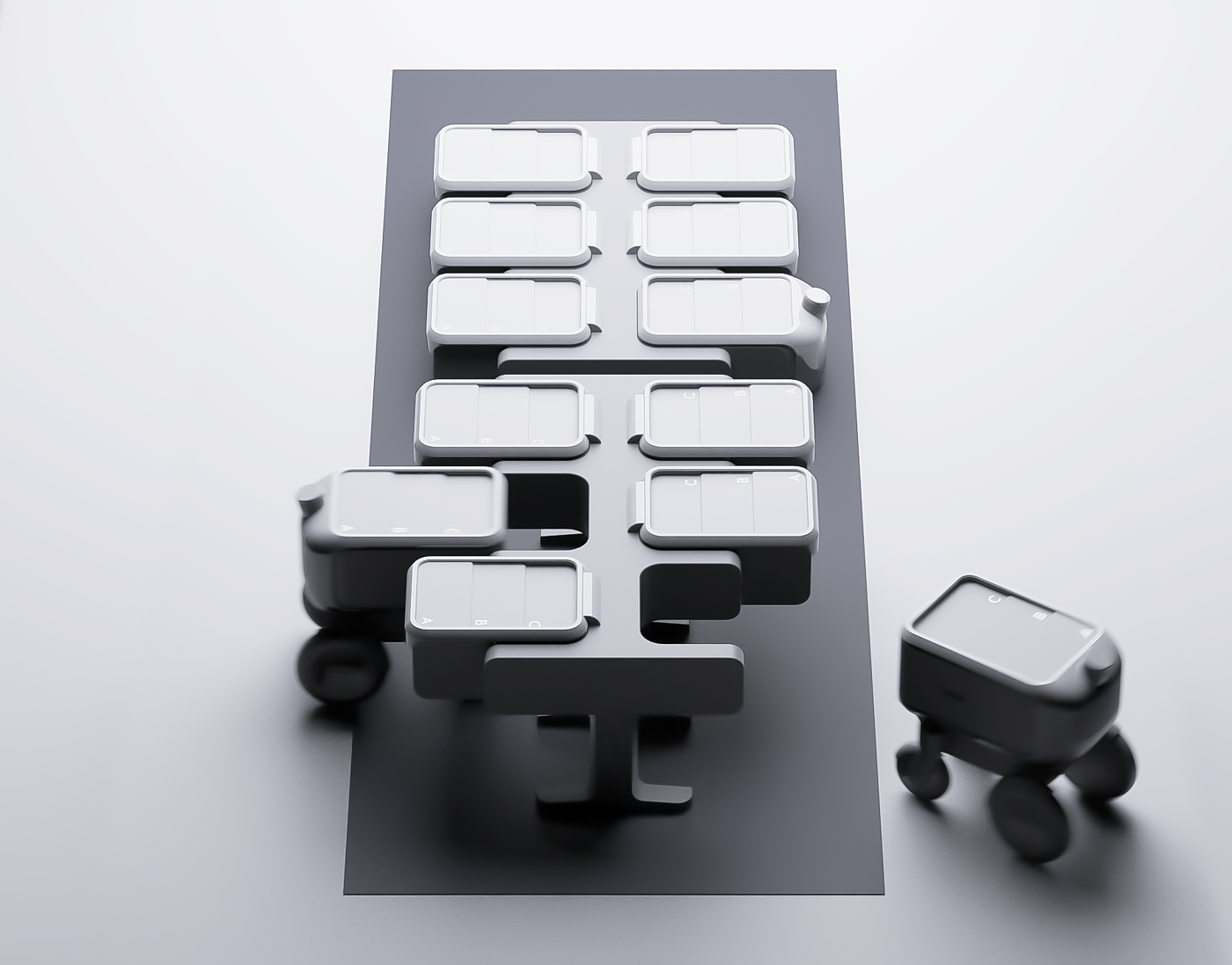

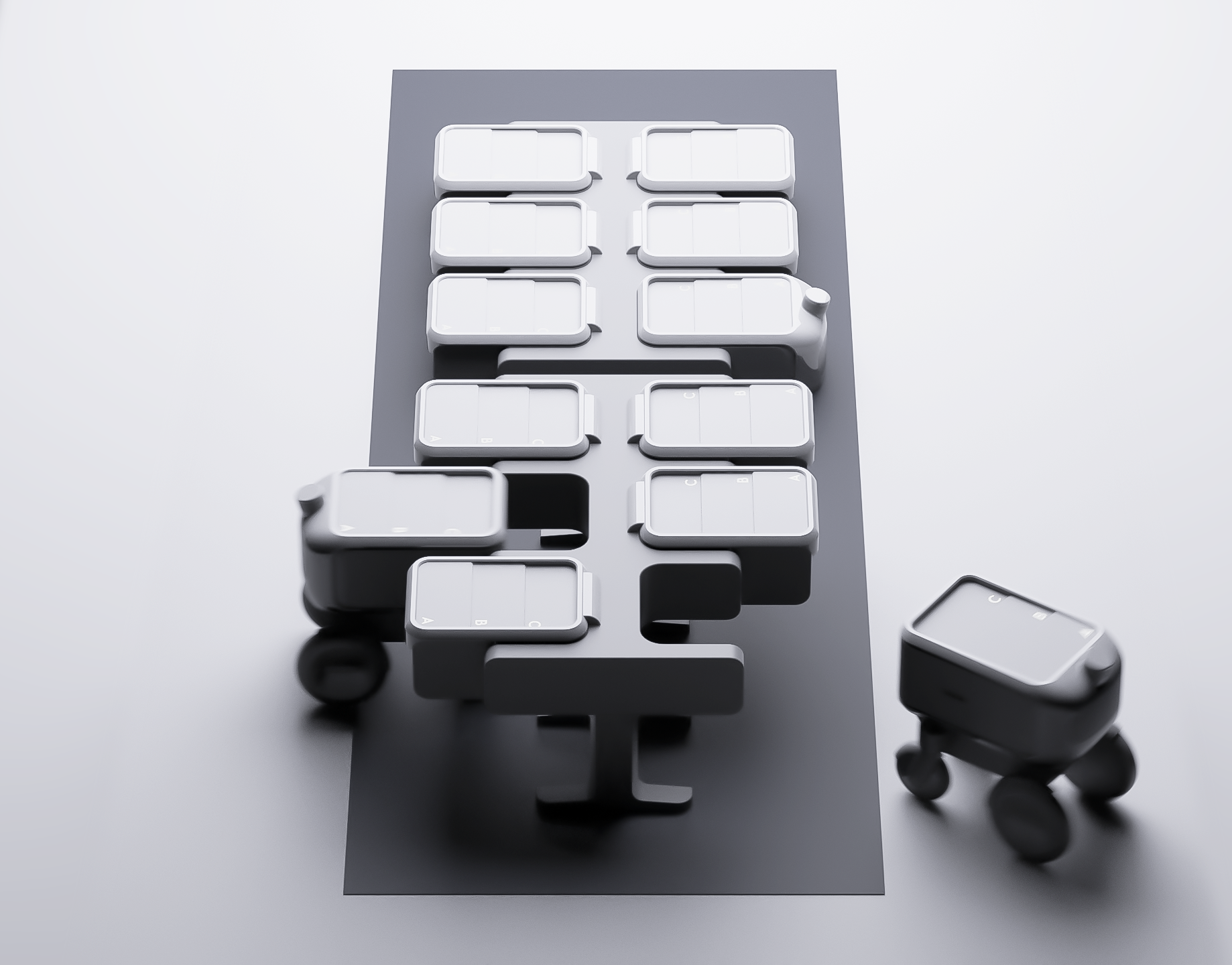
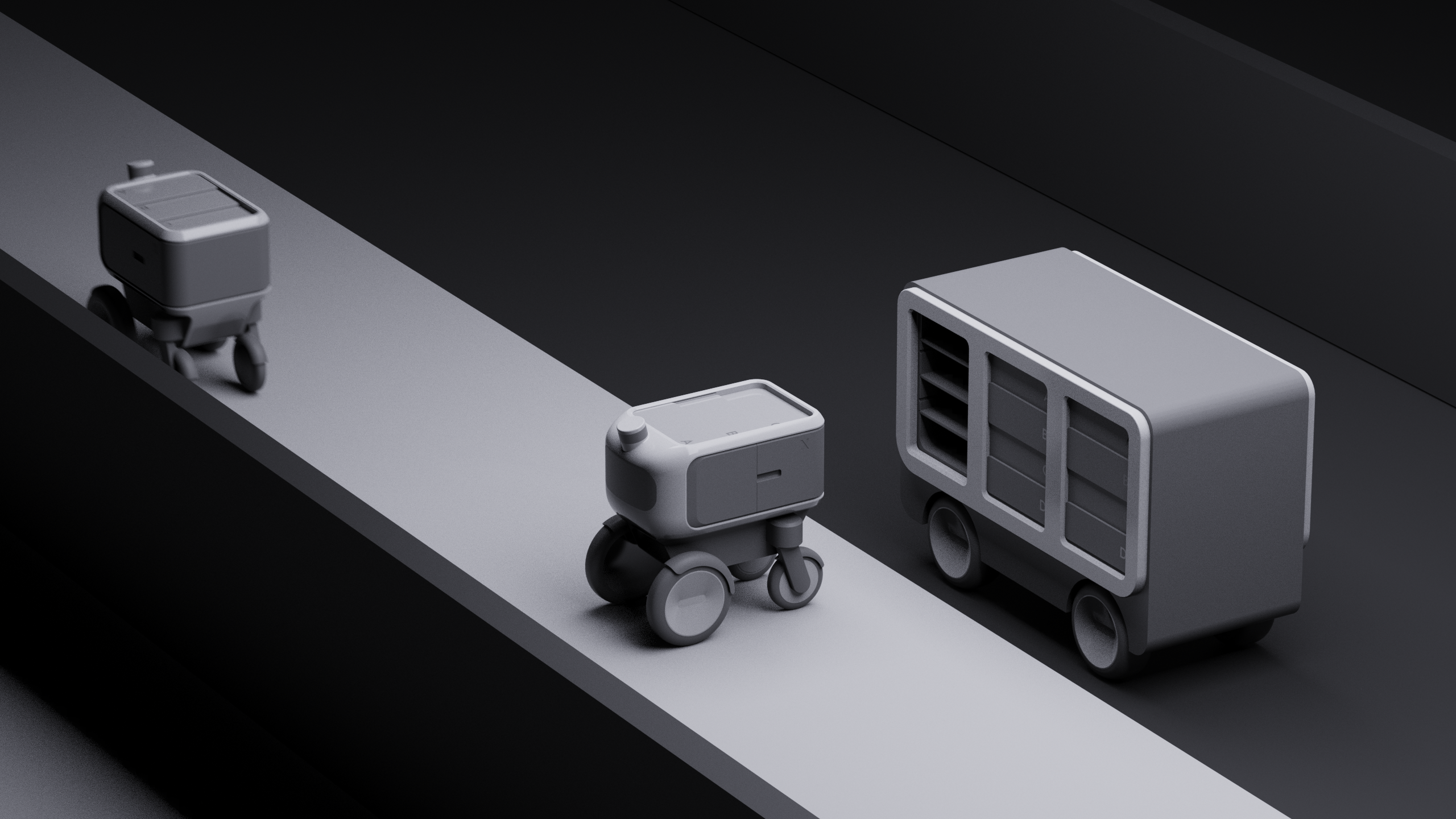
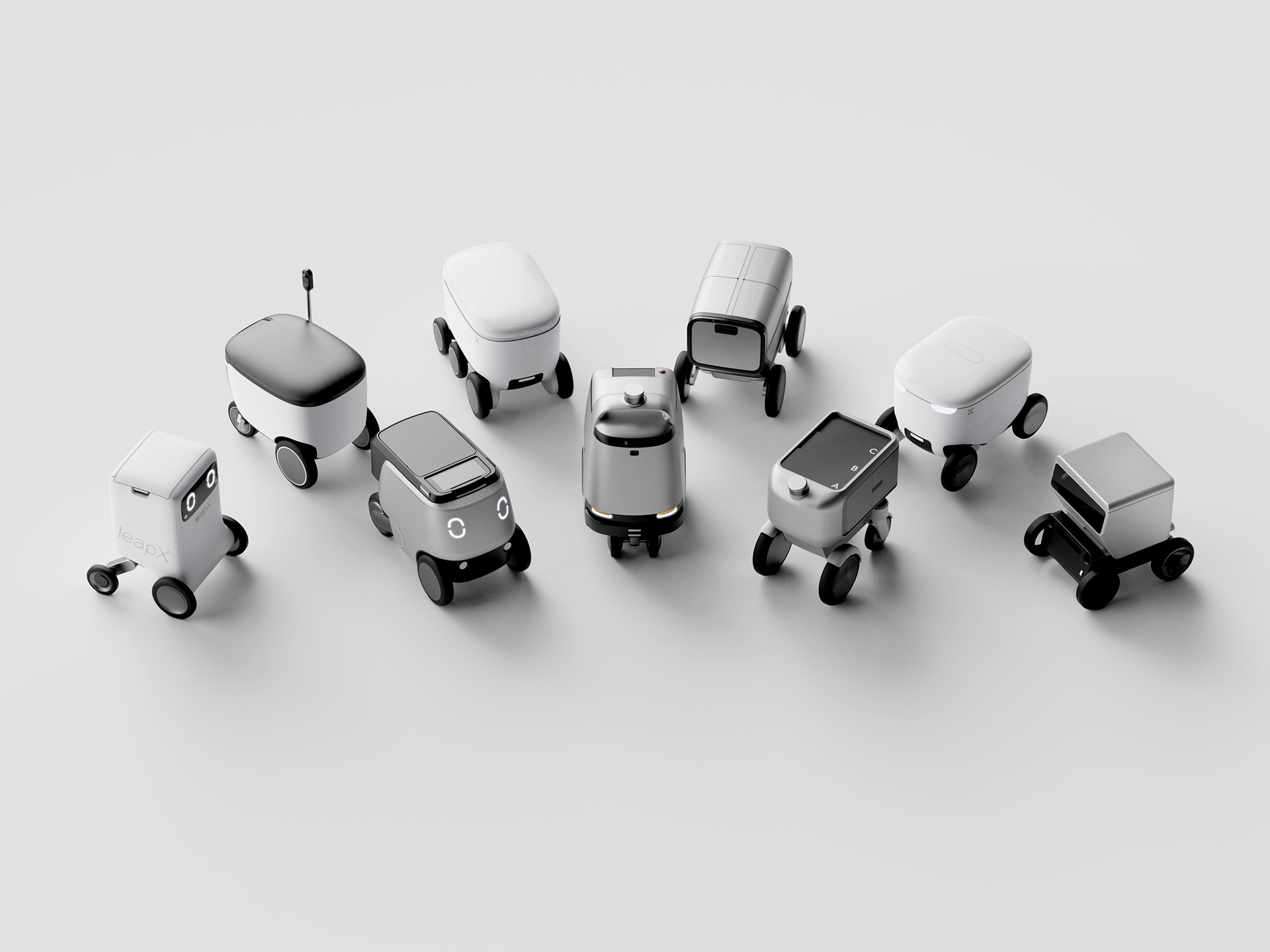
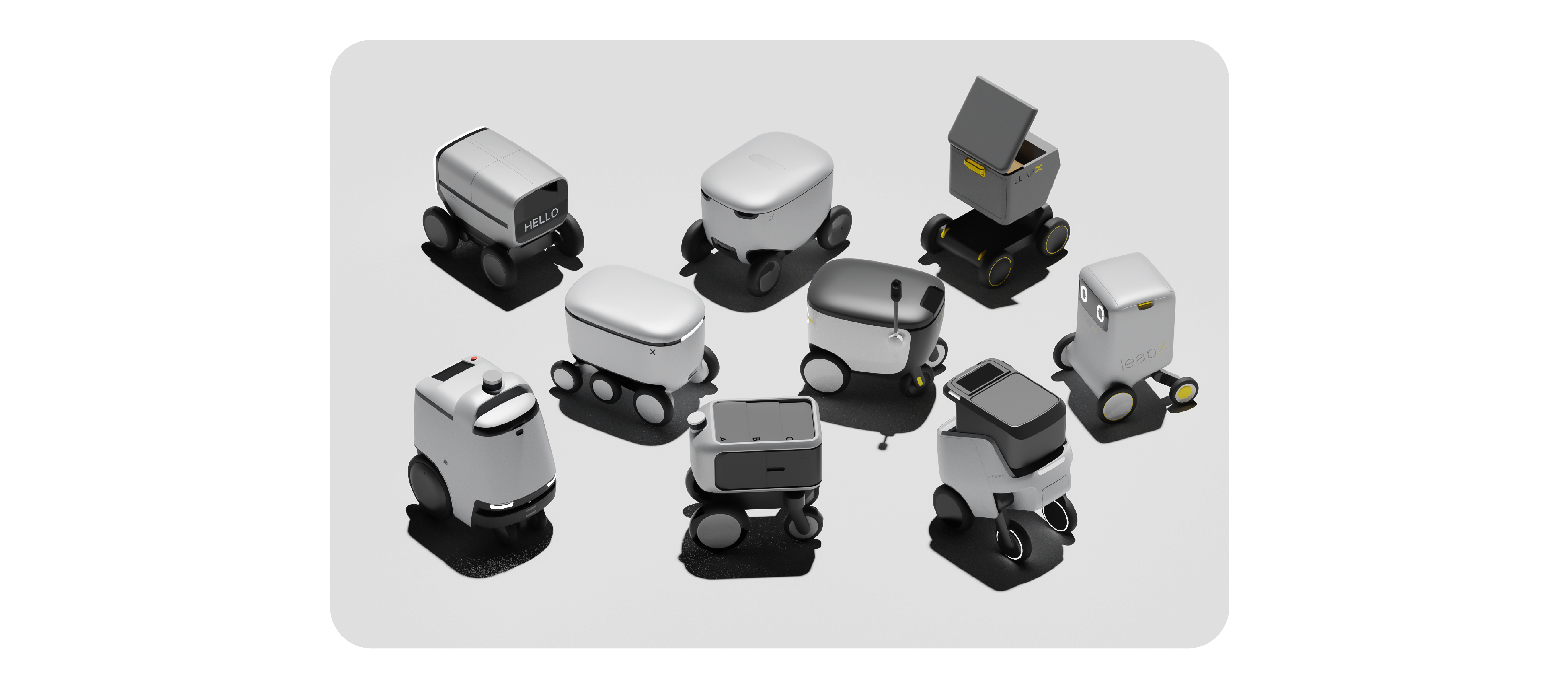
We also envisage the future scene of cooperation between distribution robots of different sizes, allowing large unmanned express vehicles to carry out long-distance transportation, and then pass it to small distribution robots (or pass it to small distribution robots through express delivery stations) after arriving in the community, completing the transportation of the last kilometer to the user's door. The whole process can be completed automatically without manual intervention.
Welcome to the link below to learn about the design process behind the product
https://www.puxiang.com/articles/28a381b9af9409ab402a0b16852a7f85
Design Team|Siyoon Kim, Yumian Deng, Yufeng Shang
Visualization|Barney Mason, Kaihuang Chen, Yushen Wang, Yaokun Wu
Client|Xingshen Technology
LEAPX DESIGN
-
www.leapx.design
contact@leapx.design
-


















The real use scene of the robot I saw before: a group of children circled around a restaurant delivery robot, one of the children tried to pull and change its forward direction, and the other repeatedly hit the robot hard, and nobody cared until I left for 3 minutes.
It is possible to choose the double-drive double-universal wheel pick-up mode car cabinet separation may land and subsequent applications will be more extensive. If it were you, which plan would you choose to implement?
The future will certainly be realized, and the conditions are not particularly mature yet.
It seems that I can't turn the corner.
There is a typo, which is automatically written as an automatic word.
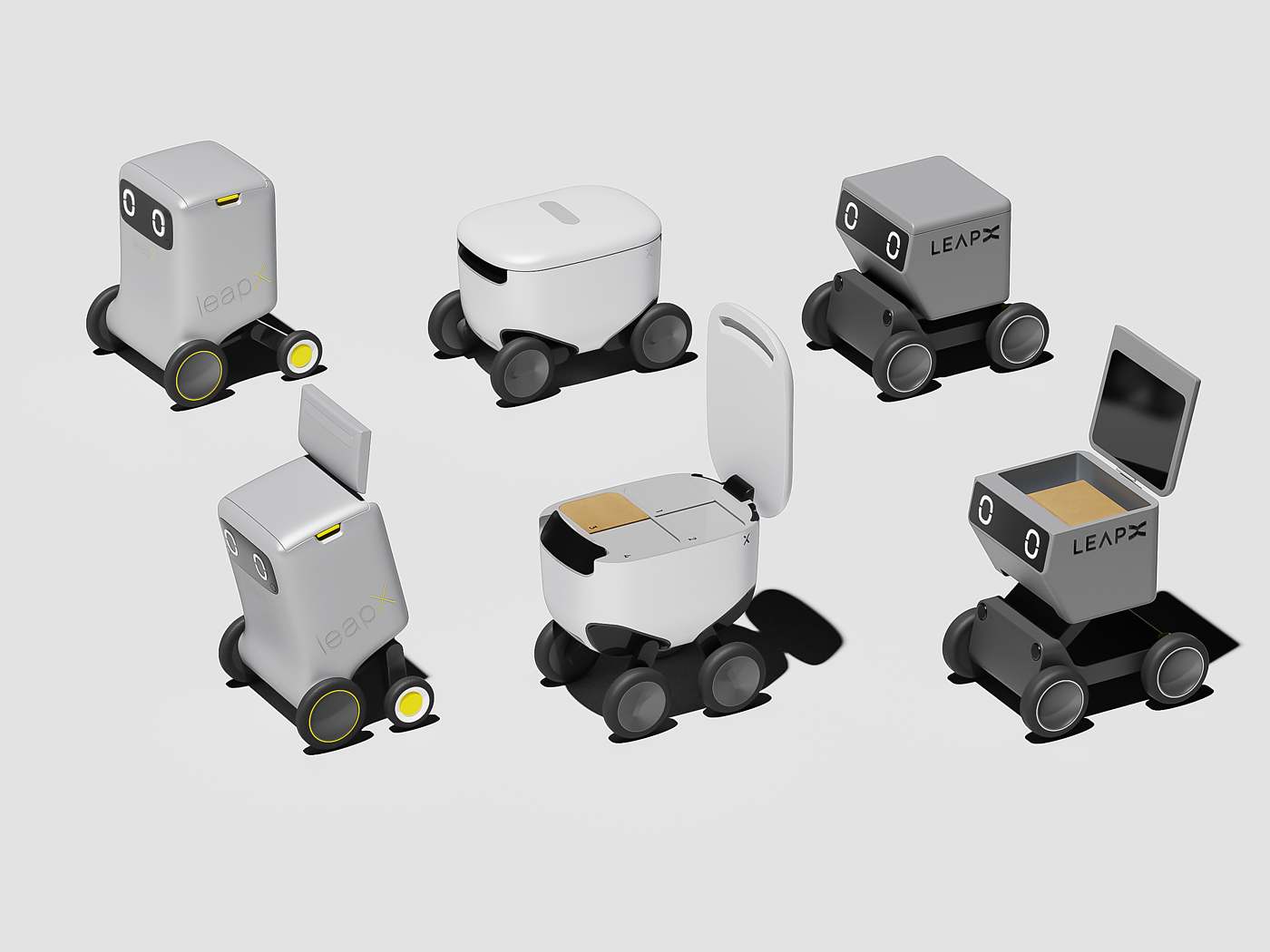
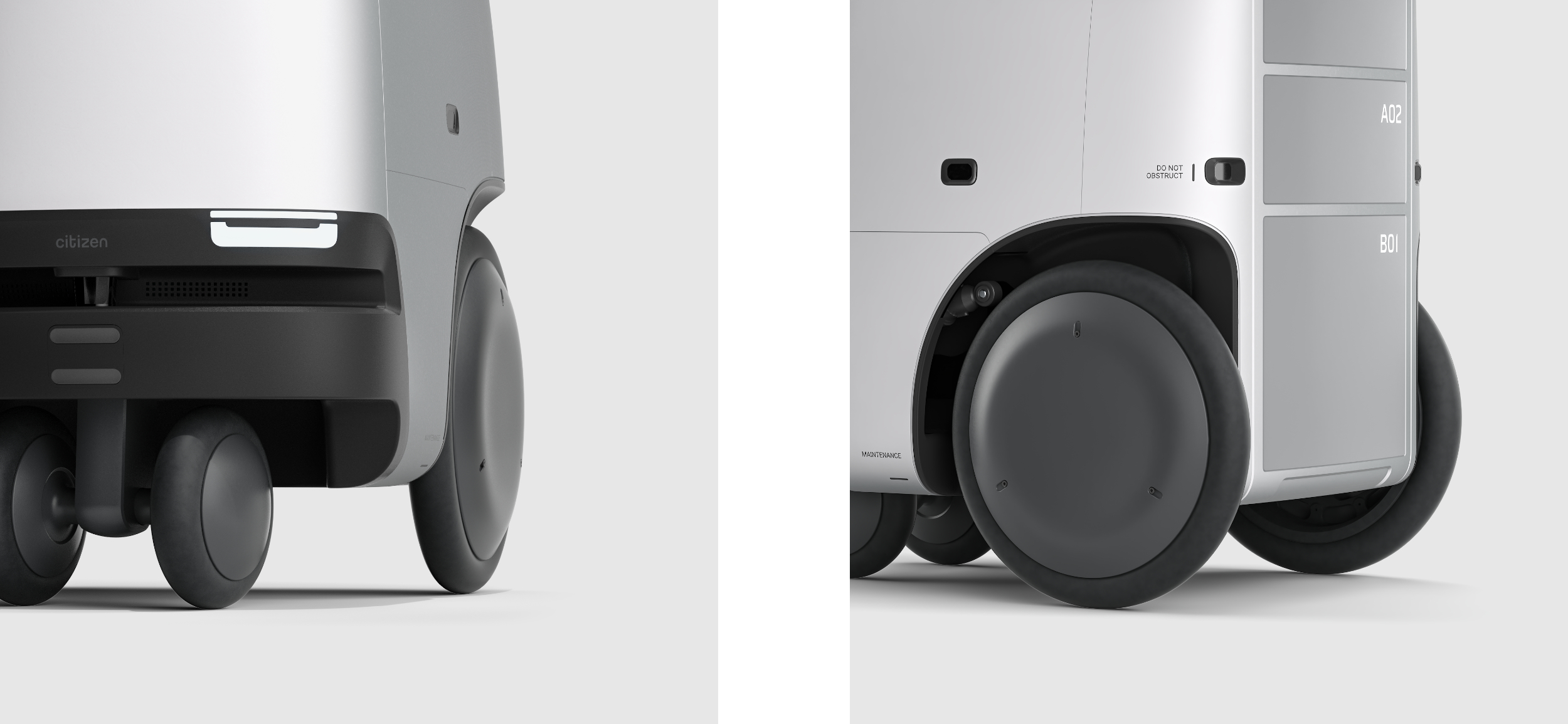
I have to say that LEAPX DESIGN is a very professional design team. The works can be said to be full marks in terms of modeling, mechanical structure innovation and expressiveness, but there are still fatal problems in considering the scene and technical productization. For example, the final solution uses the rear wheel hub motor and the chassis solution of the front wheel small universal wheel, which has the advantages of low cost and high flexibility. This structure is more suitable for short-distance transportation in the park, not suitable for open roads, it is easy to get stuck in a higher speed bump or shallow pit, and it may overturn in serious cases. If the product positioning is short-distance transportation, the more expensive mechanical lidar with 16 lines or more is selected as the sensing scheme, the cost is too high and the standardization is low. At present, vision and solid-state radar will be more suitable for short-distance closed roads, so the cost, function and scene definition are contradictory. Of course, this may not be the problem of the design team, but the customer's product decision-making problem, but it can be recovered through deeper research on technology, scenarios, and users, otherwise it will be a fatal mistake for the entire design.
Excuse me, what software is used to render, I hope I can learn about
Shuai cried. However, the implementation is still a little far away. I think the current masses will definitely move their hands and feet on robots. the concept is quite good
That's great. Our school has realized the freedom of small barbarian donkeys. It's a great design!
I did the same project before and found that there were indeed many problems. For example, the differential steering method will be destructive to the ground, if in some scenes such as carpeted hotel rooms. There are also problems such as overheating of the hub motor, which will be left behind. It's a pity. But you did a great job!
The sketches aren't exquisite, but the models are particularly cool.
Massacre Novice Village
Ledi
Riders all over the street cry dizzy on the road with kitchen knives looking for you desperately!
Xiaopeng P3